1Īóšō╬─▒│Š░
ÖCŲ„╚╦┐╔ęį×ķÜł╝▓╚╦╗“└Ž─Ļ╚╦Ą─╚š│Ż╔·╗Ņ╠ß╣®śO┤¾Ä═ų·Ż¼▒╚╚ńšfÖCŲ„╚╦▌oų·┤®ę┬ĪŻ╚╗Č°┤®ę┬▀^│╠ųąŻ¼ė├æ¶╔Žų½Ą─═╗╚╗äėū„┐╔─▄ī¦(d©Żo)ų┬┤®ę┬╚╬äš(w©┤)Ą─╩¦öĪŻ¼╔§ų┴×ķė├æ¶Ä¦üĒ╬ŻļUĪŻ╩╣ė├ęĢėXé„ĖąŲ„īŹĢrūĘ█Öė├æ¶╔Žų½▀\äėŻ©user posture trackingŻ®ĘŪ│Ż└¦ļyŻ¼ę“×ķę┬Ę■║═ÖCŲ„╚╦Č╝ī”ė├æ¶įņ│╔┴╦š┌ō§ĪŻ└²╚ńŻ¼╩╣ė├ķ_į┤╣Ū„└ūĘ█Ö┐“╝▄Ż©OpenNI Skeleton Tracker [1]Ż®║═╔ŅČ╚īW(xu©”)┴Ģ(x©¬)ĘĮĘ©OpenPose [2]Ż¼Š∙¤oĘ©īŹ╩®£╩(zh©│n)┤_Ą─ūĘ█Öė├æ¶╔Žų½▀\äėĪŻ
×ķ┴╦ĮŌøQ╔Ž╩÷å¢Ņ}Ż¼╬ęéā╠ß│÷┴╦ę╗ĘNČÓé„ĖąŲ„ą┼Žó╚┌║ŽĄ─╚╦¾w╣Ū„└īŹĢrūĘ█ÖĘĮĘ©ĪŻ▒Š╬─蹊┐ų„ę¬░³└©ęįŽ┬╚²³cŻ║Ą┌ę╗Ż¼╬ęéā═©▀^Ė▀╦╣ļ[ūā┴┐─Żą═Ż©Gaussian Process Latent VariableModelŻ¼GP-LVMŻ®Ż¼īó▀\äė╔Žų½Ą─Ė▀ŠS▀\äėė│╔õų┴Ą═ŠSČ╚Ą─ļ[ūā┴┐┐šķgųąŻ©latent spaceŻ®ĪŻįō┐šķg┐╔ęįßśī”▓╗═¼ė├æ¶Ą─▓╗═¼╔Žų½Üł╝▓╠ž³cŻ¼Į©┴óéĆąį╗»ė├æ¶▌oų·─Żą═Ż©personalized user modelŻ®ĪŻĄ┌Č■Ż¼╬ęéāį┌ļ[ūā┴┐┐šķgųą╩╣ė├žÉ╚~╦╣ŠW(w©Żng)Įj(lu©░)Ż©Bayesian networksŻ®Ż¼įōŠW(w©Żng)Įj(lu©░)╚┌║Ž┴╦ÖCŲ„╚╦║═ė├æ¶ų«ķg┴”Ą─ą┼ŽóŻ¼ęį╝░ÖCŲ„╚╦─®Č╦╬╗ų├ą┼ŽóŻ¼▀MČ°īŹĢrūĘ█Ö╚╦¾w╔Žų½▀\äėĪŻĄ┌╚²Ż¼╬ęéā╩╣ė├īė╝ēČÓ╚╬äš(w©┤)┐žųŲŻ©hierarchical multi-task control)Ż¼╩╣ÖCŲ„╚╦╝╚┐╔ęį╗∙ė┌┴”Ą─ą┼ŽóūįäėĖ─ūā▀\äė▄ē█EÅ─Č°▒ŻūCė├æ¶░▓╚½Ż¼ėų┐╔ęį═Ļ│╔┤®ę┬╚╬äš(w©┤)ĪŻ
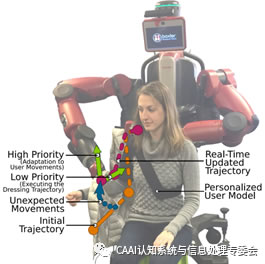
łD1 BaxterÖCŲ„╚╦▌oų·Üł╝▓╚╦┤®ę┬
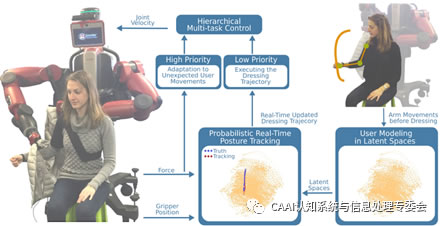
2ĪóŽĄĮy(t©»ng)Ė┼╩÷
╚ńłD2╦∙╩ŠŻ¼╬ęéāę¬Ū¾ĮĪ┐Ąė├æ¶┤®ų°┐ćĦüĒ─ŻöM╔Žų½Üł╝▓ŪķørĪŻ╬ęéāīó▓╔╝»ė├æ¶╔Žų½ļSÖC▀\äėĄ─öĄ(sh©┤)ō■(j©┤)Ż¼īóŲõė│╔õų┴Č■ŠSļ[ūā┴┐┐šķgųąĮ©┴óéĆąį╗»ė├æ¶─Żą═ĪŻį┌įōČ■ŠS┐šķgųąŻ¼╬ęéā▓╔ė├╗∙ė┌Ė┼┬╩Ą─┴Żūė×V▓©ĘĮĘ©Ż©particle filterŻ®Ż¼═Ļ│╔ČÓé„ĖąŲ„ą┼Žó╚┌║ŽŻ©ÖCŲ„╚╦┼cė├æ¶ķg┴”Ą─ą┼ŽóŻ¼ÖCŲ„╚╦─®Č╦ł╠(zh©¬)ąąŲ„╬╗ų├ą┼ŽóŻ®Ż¼Å─Č°īŹ¼F(xi©żn)ė├æ¶╔Žų½▀\äėĄ─īŹĢr£╩(zh©│n)┤_ūĘ█ÖĪŻį┌╬ęéāų«Ū░Ą─蹊┐ųą [3], ╬ęéāīóÖCŲ„╚╦┤®ę┬äėū„├Ķ╩÷×ķā╔éĆīė╝ē╚╬äš(w©┤)Ż║Ė▀īė╝ē╚╬äš(w©┤)╝┤ÖCŲ„╚╦Ė∙ō■(j©┤)┴”Ą─ą┼Žóš{(di©żo)š¹▀\äė▄ē█EŻ¼Å─Č°īŹĢr£pąĪė├æ¶Ą─╩▄┴”ŪķørŻ¼┤_▒Żė├æ¶Ą─╩µ▀m┼c░▓╚½Ż╗Ą═īė╝ē╚╬äš(w©┤)╝┤═©▀^PD┐žųŲ═Ļ│╔Å─╩▌-ųŌ-╝ńĻP(gu©Īn)µIĄ─┤®ę┬▄ē█EŻ¼įō▄ē█Eė╔▒Š╬─Ą─ė├æ¶╔Žų½ūĘ█ÖĘĮĘ©īŹĢrĖ³ą┬ĪŻ
łD2 ŽĄĮy(t©»ng)Ė┼└©łD
łD3š╣╩Š┴╦═Ļš¹Ą─┤®ę┬▀^│╠ĪŻ«ö(d©Īng)ė├æ¶į┌┤®ę┬▀^│╠╠¦ŲĖņ▓▓ĢrŻ¼ÖCŲ„╚╦ę▓ŽÓæ¬(y©®ng)Ė─ūā▄ē█EüĒ£p╔┘╩▄┴”ŪķørŻ¼▓óīŹĢr▀\ąąų┴ą┬Ą─ųŌĻP(gu©Īn)╣Ø(ji©”)║═╝ńĻP(gu©Īn)╣Ø(ji©”)╬╗ų├ĪŻ

łD3 ÖCŲ„╚╦┤®ę┬▀^│╠
łD4 š╣╩Š┴╦į┌Ą═ŠSļ[ūā┴┐┐šķgā╚(n©©i)┴Żūė×V▓©Ą─▀^│╠ĪŻ╬ęéāĖ∙ō■(j©┤)┴”║═╬╗ų├Ą─ą┼Žó×ķ├┐éĆ┴Żūė┘xėĶą┬ÖÓ(qu©ón)ųžŻ¼Å─Ȱ裣h(hu©ón)Ė³ą┬ĪŻłDųąŅü╔½įĮ£\┤·▒ĒÖÓ(qu©ón)ųžįĮĖ▀ĪŻ
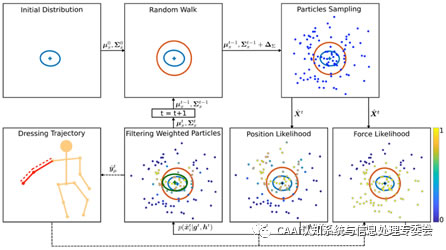
łD4 Ą═ŠSļ[ūā┴┐┐šķgā╚(n©©i)┴Żūė×V▓©
3ĪóīŹ“×Ęų╬÷
▒Š╬─╩ūŽ╚ī”ļ[ūā┴┐┐šķgéĆąį╗»ė├æ¶─Żą═▀MąąĘų╬÷Ż¼╚ńłD5╦∙╩ŠĪŻįō─Żą═ėąę╗Ž┬3éĆ╠ž³cŻ║Ą┌ę╗Ż¼įō─Żą═┐╔ęį├Ķ╩÷▓╗═¼ė├æ¶Ą─▓╗═¼╔Žų½Üł╝▓╠ž³cĪŻłD5└’├µ▓╗═¼Ņü╔½╝┤┤·▒Ē▓╗═¼Üł╝▓ŪķørĄ─▀\äė┐šķgŻ╗Ą┌Č■³cŻ¼Ą═ŠS┐šķgśO┤¾£pąĪ┴╦┴Żūė×V▓©Ą─ėŗ╦Ń┴┐Ż╗Ą┌╚²³cŻ¼įōéĆąį╗»─Żą═ÖÓ(qu©ón)║Ō┴╦ė├æ¶Üł╝▓╔Žų½▀\äėĄ─┐╔▀_(d©ó)ąį (reachability) ║═ė├æ¶Ų½║├Ż©preferenceŻ®ĪŻ
▒Š╬─▀Ć▀Mąą┴╦ę╗ą®┴ąī”▒╚įć“ׯ¼Ųõųą░³└©┴╦┼cų╗ė├ęĢėXĘĮĘ©ūĘ█ÖĄ─š`▓Ņ▒╚▌^Ż¼╚ńłD6╦∙╩ŠĪŻ▒Š╬─╦∙╠ß│÷Ą─ĘĮĘ©«a(ch©Żn)╔·┴╦3.3cmĄ─š`▓ŅŻ¼╩ŪęĢėXūĘ█Öš`▓ŅĄ─┴∙Ęųų«ę╗ĪŻ
▒Š╬─į┌20├¹ė├æ¶╔Ž═Ļ│╔┴╦ŽÓĻP(gu©Īn)īŹ“×£yįćĪŻ├┐éĆė├æ¶▀Mąą50┤╬įć“×▓ó─ŻöM▓╗═¼Ą─Üł╝▓ŅÉą═Ż¼╚ńłD7╦∙╩ŠĪŻ
4ĪóĘų╬÷┼cĮY(ji©”)šō
▒Š╬─╠ß│÷┴╦ę╗ĘN└¹ė├ČÓé„ĖąŲ„ą┼Žóį┌Ą═ŠSļ[ūā┴┐┐šķgųąīŹĢrūĘ█Öė├æ¶▀\äėĄ─ĘĮĘ©ĪŻįōĘĮĘ©×ķį┌╬’└Ē╚╦ÖCĮ╗╗źŻ©physical human-robot interactionŻ®ųąŻ¼«ö(d©Īng)╚╦¾w▀\äė▒╗ć└(y©ón)ųžš┌ō§Č°¤oĘ©ė├å╬ę╗ęĢėXą┼Žó═Ļ│╔ūĘ█ÖĄ─å¢Ņ}Ż¼╠ß╣®┴╦ę╗ĘNĮŌøQĘĮ░ĖĪŻ
ģó┐╝╬─½I(xi©żn)Ż║
[1] http://wiki.ros.org/openni_tracker
[2] Cao, Zhe, et al. "Realtimemulti-person 2d pose estimation using part affinity fields." Proceedingsof the IEEE Conference on Computer Vision and Pattern Recognition. 2017
[3] Zhang, Fan, Antoine Cully, andYiannis Demiris. "Personalized robot-assisted dressing using user modelingin latent spaces." 2017 IEEE/RSJ International Conference on IntelligentRobots and Systems (IROS). IEEE, 2017.
į┌Ž┬ų½═Ō╣Ū„└ÖCŲ„╚╦Ą─ĘĆ(w©¦n)Č©ąįįu╣└Īó▓ĮæB(t©żi)ęÄ(gu©®)äØ║═ŲĮ║Ō┐žųŲųąŻ¼╚╦ÖCŽĄĮy(t©»ng)┘|(zh©¼)ą─╩Ūųžę¬Ą─ģóöĄ(sh©┤)ų«ę╗
ČÓ┼_žøŽõĄĮ╚╦ÖCŲ„╚╦š²į┌▀\ąąŻ¼öyĦų°žøŽõ▌pŪ╔├¶Į▌ĄžüĒ╗ž┤®╦¾ė┌┤µā”ģ^(q©▒)║═╣ż╬╗ų«ķgŻ¼Ė▀╦┘═Ļ│╔├└Ŗy«a(ch©Żn)ŲĘĄ─┤µÆ■ū„śI(y©©)ĪŻ▀@╩ŪśI(y©©)ā╚(n©©i)╩ūéĆČÓīėžøŽõĄĮ╚╦ÖCŲ„╚╦ĮŌøQĘĮ░ĖĄ─┬õĄžæ¬(y©®ng)ė├Ż¼ŽÓ▌^═¼Ą╚├µĘeĄ─╚╦╣żé}Ż¼ą¦┬╩╠ß╔²2.5▒ČĪŻ
╗∙ė┌ėŗ╦ŃÖCęĢėXĄ─ųŪ─▄ūRäe╝╝ąg(sh©┤) ║═SLAMČ©╬╗╝╝ąg(sh©┤)Ą─ę²╚ļŻ¼ätīŹ¼F(xi©żn)┴╦─┐ś╦(bi©Īo)┼cė├æ¶Ą─äėæB(t©żi)Š½£╩(zh©│n)ūRäe║═Į╗╗źĪŻ─▄ē“▌oų·šn╠├Į╠īW(xu©”)Ż¼╠ß╔²▀h(yu©Żn)│╠Į╠īW(xu©”)║═£Ž═©ą¦┬╩Ż¼ĀIįņł÷Š░╗»Į╠īW(xu©”)ą┬¾w“×
┼õ╦═ÖCŲ„╚╦ŠC║Ž┴╦SLAMĪóųŪ─▄ī¦(d©Żo)║Į▒▄šŽĪóČÓÖCš{(di©żo)Č╚Īó╚╦ÖCĮ╗╗źĄ╚╚╦╣żųŪ─▄╝╝ąg(sh©┤)Ż¼×ķ▓═ÅdĪóŠŲĄĻĪóśŪėŅĄ╚ÅVĘ║ł÷Š░╠ß╣®┼õ╦═ÖCŲ„╚╦ĮŌøQĘĮ░ĖŻ¼į┌Ė▀äėæB(t©żi)Ą─╔╠śI(y©©)Łh(hu©ón)Š│Ž┬Š½┤_Į©łD║═Č©╬╗Ż¼īŹ¼F(xi©żn)Ė▀ą¦▀\ąąŻ¼ĮĄĄ═Ų¾śI(y©©)│╔▒Š
Ė▀Š½Č╚ÖCŲ„╚╦▓┘┐žĄ─╬ÕŅÉĘĮĘ©:Ż©1Ż®╗∙ė┌é„Ėąą┼ŽóĄ─ĘĮĘ©Ż©2Ż®╗∙ė┌╚ßĒśÖCśŗ(g©░u)Ą─ĘĮĘ©Ż©3Ż®╗∙ė┌Łh(hu©ón)Š│╝s╩°Ą─ĘĮĘ©Ż©4Ż®╗∙ė┌Ėąų¬╝s╩°╝»│╔Ą─ĘĮĘ©Ż©5Ż®Ę┬╔·Ą─ĘĮĘ©
ÖCŲ„╚╦╔╠śI(y©©)┬õĄž░Ė└²YOGO ROBOT,YOGO┼cīÜ╔Įģ^(q©▒)š■Ė«║Žū„Ż¼┤“įņÖCŲ„╚╦ųŪ╗█śŪėŅ╝»╚║ĪŻ
ą┬ę╗┤·Ž┬ų½┐ĄÅ═(f©┤)═Ō╣Ū„└ÖCŲ„╚╦ūįų„čą░l(f©Ī)Ż¼┐╔ęįīŹ¼F(xi©żn)¤o╣šš╚▌oų·Ž┬ŲĮĄžąąū▀Īó┐ńįĮšŽĄKĪó▐D(zhu©Żn)ÅØęį╝░╔ŽŽ┬śŪ╠▌Ą╚ł÷Š░Ż¼Ä═ų·┤®┤„š▀ßīĘ┼╔Žų½žō(f©┤)ō·(d©Īn)Ż¼öU┤¾▀\äėĘČć·Īóį÷╝ėŲĮ║Ōąį║═░▓╚½ąį
ć°═Ō═Ō╣Ū„└ÖCŲ„╚╦Ą─蹊┐įńė┌ć°ā╚(n©©i)Ż¼╔╠śI(y©©)╗»╦«ŲĮę▓Ė▀Ż¼╬ęć°╩Ū└^├└ć°Īóęį╔½┴ą║═╚š▒Šų«║¾Ż¼Ą┌╦─éĆ│╔╣”čą░l(f©Ī)═Ō╣Ū„└ÖCŲ„╚╦Ą─ć°╝ę
ÖCŲ„╚╦▀b▓┘ū„ęčÅVĘ║æ¬(y©®ng)ė├į┌ßt(y©®)»¤ŅI(l©½ng)ė“ĪóśOČ╦Łh(hu©ón)Š│╠Į╦„╚ń╠½┐š┼c╔Ņ║Żł÷Š░ĪóĘ└┐ųĘ└▒¼æ¬(y©®ng)ė├ł÷Š░Ż¼╝░╗∙ė┌╣żśI(y©©)ÖCąĄ▒█Ą─ūįäė╗»╔·«a(ch©Żn)ųą
ą┬╣┌▓ĪČŠ═╣’@┴╦ÖCŲ„╚╦į┌┼cé„╚Š▓Īī”┐╣ųąĄ─ųžę¬ū„ė├Ż¼ÖCŲ„╚╦▓╗Ģ■Ėą╚Šé„╚Š▓Ī
ę╗ĘN╗∙ė┌ŠĒĘe╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)Ą─ŠC║Žė|ėXūRäe┐“╝▄Ż¼┐╔ęį└¹ė├ī”Ž¾Ą─šZ┴xī┘ąį├Ķ╩÷║═ė|ėXöĄ(sh©┤)ō■(j©┤)Ą─╚┌║ŽüĒīŹ¼F(xi©żn)ī”ą┬ī”Ž¾Ą─ūRäe
ė|ėXīŹ¼F(xi©żn)Ą─Ė„éĆŁh(hu©ón)╣Ø(ji©”)ųąŻ║ė|ėXÖC└ĒÅ═(f©┤)ļsĪóė|ėXöĄ(sh©┤)ō■(j©┤)ļyęį½@╚ĪĪóė|ėXŽĄĮy(t©»ng)šµį┘¼F(xi©żn)īŹČ╚Ą═Īóė|ėXæ¬(y©®ng)ė├öĄ(sh©┤)┴┐╔┘






