1Īóšō╬─▒│Š░
ÖCŲ„╚╦┐╔ęį×ķÜł╝▓╚╦╗“└Ž─Ļ╚╦Ą─╚š│Ż╔·╗Ņ╠ß╣®śO┤¾Ä═ų·Ż¼▒╚╚ńšfÖCŲ„╚╦▌oų·┤®ę┬ĪŻ╚╗Č°┤®ę┬▀^│╠ųąŻ¼ė├æ¶╔Žų½Ą─═╗╚╗äėū„┐╔─▄ī¦ų┬┤®ę┬╚╬䚥─╩¦öĪŻ¼╔§ų┴×ķė├æ¶Ä¦üĒ╬ŻļUĪŻ╩╣ė├ęĢėXé„ĖąŲ„īŹĢrūĘ█Öė├æ¶╔Žų½▀\äėŻ©user posture trackingŻ®ĘŪ│Ż└¦ļyŻ¼ę“×ķę┬Ę■║═ÖCŲ„╚╦Č╝ī”ė├æ¶įņ│╔┴╦š┌ō§ĪŻ└²╚ńŻ¼╩╣ė├ķ_į┤╣Ū„└ūĘ█Ö┐“╝▄Ż©OpenNI Skeleton Tracker [1]Ż®║═╔ŅČ╚īW┴ĢĘĮĘ©OpenPose [2]Ż¼Š∙¤oĘ©īŹ╩®£╩┤_Ą─ūĘ█Öė├æ¶╔Žų½▀\äėĪŻ
×ķ┴╦ĮŌøQ╔Ž╩÷å¢Ņ}Ż¼╬ęéā╠ß│÷┴╦ę╗ĘNČÓé„ĖąŲ„ą┼Žó╚┌║ŽĄ─╚╦¾w╣Ū„└īŹĢrūĘ█ÖĘĮĘ©ĪŻ▒Š╬─蹊┐ų„ę¬░³└©ęįŽ┬╚²³cŻ║Ą┌ę╗Ż¼╬ęéā═©▀^Ė▀╦╣ļ[ūā┴┐─Żą═Ż©Gaussian Process Latent VariableModelŻ¼GP-LVMŻ®Ż¼īó▀\äė╔Žų½Ą─Ė▀ŠS▀\äėė│╔õų┴Ą═ŠSČ╚Ą─ļ[ūā┴┐┐šķgųąŻ©latent spaceŻ®ĪŻįō┐šķg┐╔ęįßśī”▓╗═¼ė├æ¶Ą─▓╗═¼╔Žų½Üł╝▓╠ž³cŻ¼Į©┴óéĆąį╗»ė├æ¶▌oų·─Żą═Ż©personalized user modelŻ®ĪŻĄ┌Č■Ż¼╬ęéāį┌ļ[ūā┴┐┐šķgųą╩╣ė├žÉ╚~╦╣ŠWĮjŻ©Bayesian networksŻ®Ż¼įōŠWĮj╚┌║Ž┴╦ÖCŲ„╚╦║═ė├æ¶ų«ķg┴”Ą─ą┼ŽóŻ¼ęį╝░ÖCŲ„╚╦─®Č╦╬╗ų├ą┼ŽóŻ¼▀MČ°īŹĢrūĘ█Ö╚╦¾w╔Žų½▀\äėĪŻĄ┌╚²Ż¼╬ęéā╩╣ė├īė╝ēČÓ╚╬äš┐žųŲŻ©hierarchical multi-task control)Ż¼╩╣ÖCŲ„╚╦╝╚┐╔ęį╗∙ė┌┴”Ą─ą┼ŽóūįäėĖ─ūā▀\äė▄ē█EÅ─Č°▒ŻūCė├æ¶░▓╚½Ż¼ėų┐╔ęį═Ļ│╔┤®ę┬╚╬äšĪŻ
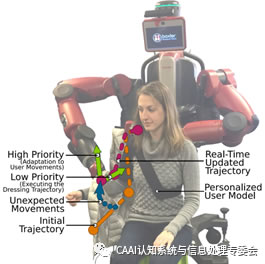
łD1 BaxterÖCŲ„╚╦▌oų·Üł╝▓╚╦┤®ę┬
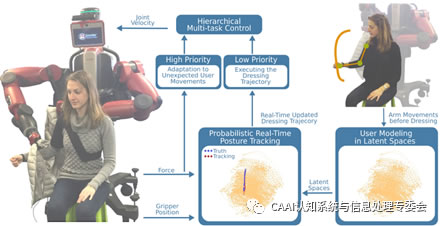
2ĪóŽĄĮyĖ┼╩÷
╚ńłD2╦∙╩ŠŻ¼╬ęéāę¬Ū¾ĮĪ┐Ąė├æ¶┤®ų°┐ćĦüĒ─ŻöM╔Žų½Üł╝▓ŪķørĪŻ╬ęéāīó▓╔╝»ė├æ¶╔Žų½ļSÖC▀\äėĄ─öĄō■Ż¼īóŲõė│╔õų┴Č■ŠSļ[ūā┴┐┐šķgųąĮ©┴óéĆąį╗»ė├æ¶─Żą═ĪŻį┌įōČ■ŠS┐šķgųąŻ¼╬ęéā▓╔ė├╗∙ė┌Ė┼┬╩Ą─┴Żūė×V▓©ĘĮĘ©Ż©particle filterŻ®Ż¼═Ļ│╔ČÓé„ĖąŲ„ą┼Žó╚┌║ŽŻ©ÖCŲ„╚╦┼cė├æ¶ķg┴”Ą─ą┼ŽóŻ¼ÖCŲ„╚╦─®Č╦ł╠ąąŲ„╬╗ų├ą┼ŽóŻ®Ż¼Å─Č°īŹ¼Fė├æ¶╔Žų½▀\äėĄ─īŹĢr£╩┤_ūĘ█ÖĪŻį┌╬ęéāų«Ū░Ą─蹊┐ųą [3], ╬ęéāīóÖCŲ„╚╦┤®ę┬äėū„├Ķ╩÷×ķā╔éĆīė╝ē╚╬䚯║Ė▀īė╝ē╚╬äš╝┤ÖCŲ„╚╦Ė∙ō■┴”Ą─ą┼Žóš{š¹▀\äė▄ē█EŻ¼Å─Č°īŹĢr£pąĪė├æ¶Ą─╩▄┴”ŪķørŻ¼┤_▒Żė├æ¶Ą─╩µ▀m┼c░▓╚½Ż╗Ą═īė╝ē╚╬äš╝┤═©▀^PD┐žųŲ═Ļ│╔Å─╩▌-ųŌ-╝ńĻPµIĄ─┤®ę┬▄ē█EŻ¼įō▄ē█Eė╔▒Š╬─Ą─ė├æ¶╔Žų½ūĘ█ÖĘĮĘ©īŹĢrĖ³ą┬ĪŻ
łD2 ŽĄĮyĖ┼└©łD
łD3š╣╩Š┴╦═Ļš¹Ą─┤®ę┬▀^│╠ĪŻ«öė├æ¶į┌┤®ę┬▀^│╠╠¦ŲĖņ▓▓ĢrŻ¼ÖCŲ„╚╦ę▓ŽÓæ¬Ė─ūā▄ē█EüĒ£p╔┘╩▄┴”ŪķørŻ¼▓óīŹĢr▀\ąąų┴ą┬Ą─ųŌĻP╣Ø║═╝ńĻP╣Ø╬╗ų├ĪŻ

łD3 ÖCŲ„╚╦┤®ę┬▀^│╠
łD4 š╣╩Š┴╦į┌Ą═ŠSļ[ūā┴┐┐šķgā╚┴Żūė×V▓©Ą─▀^│╠ĪŻ╬ęéāĖ∙ō■┴”║═╬╗ų├Ą─ą┼Žó×ķ├┐éĆ┴Żūė┘xėĶą┬ÖÓųžŻ¼Å─Ȱ裣hĖ³ą┬ĪŻłDųąŅü╔½įĮ£\┤·▒ĒÖÓųžįĮĖ▀ĪŻ
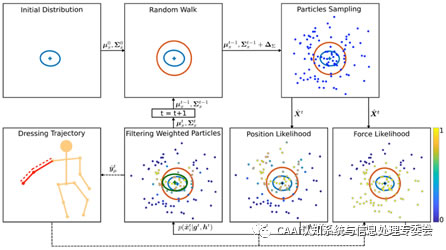
łD4 Ą═ŠSļ[ūā┴┐┐šķgā╚┴Żūė×V▓©
3ĪóīŹ“×Ęų╬÷
▒Š╬─╩ūŽ╚ī”ļ[ūā┴┐┐šķgéĆąį╗»ė├æ¶─Żą═▀MąąĘų╬÷Ż¼╚ńłD5╦∙╩ŠĪŻįō─Żą═ėąę╗Ž┬3éĆ╠ž³cŻ║Ą┌ę╗Ż¼įō─Żą═┐╔ęį├Ķ╩÷▓╗═¼ė├æ¶Ą─▓╗═¼╔Žų½Üł╝▓╠ž³cĪŻłD5└’├µ▓╗═¼Ņü╔½╝┤┤·▒Ē▓╗═¼Üł╝▓ŪķørĄ─▀\äė┐šķgŻ╗Ą┌Č■³cŻ¼Ą═ŠS┐šķgśO┤¾£pąĪ┴╦┴Żūė×V▓©Ą─ėŗ╦Ń┴┐Ż╗Ą┌╚²³cŻ¼įōéĆąį╗»─Żą═ÖÓ║Ō┴╦ė├æ¶Üł╝▓╔Žų½▀\äėĄ─┐╔▀_ąį (reachability) ║═ė├æ¶Ų½║├Ż©preferenceŻ®ĪŻ
▒Š╬─▀Ć▀Mąą┴╦ę╗ą®┴ąī”▒╚įć“ׯ¼Ųõųą░³└©┴╦┼cų╗ė├ęĢėXĘĮĘ©ūĘ█ÖĄ─š`▓Ņ▒╚▌^Ż¼╚ńłD6╦∙╩ŠĪŻ▒Š╬─╦∙╠ß│÷Ą─ĘĮĘ©«a╔·┴╦3.3cmĄ─š`▓ŅŻ¼╩ŪęĢėXūĘ█Öš`▓ŅĄ─┴∙Ęųų«ę╗ĪŻ
▒Š╬─į┌20├¹ė├æ¶╔Ž═Ļ│╔┴╦ŽÓĻPīŹ“×£yįćĪŻ├┐éĆė├æ¶▀Mąą50┤╬įć“×▓ó─ŻöM▓╗═¼Ą─Üł╝▓ŅÉą═Ż¼╚ńłD7╦∙╩ŠĪŻ
4ĪóĘų╬÷┼cĮYšō
▒Š╬─╠ß│÷┴╦ę╗ĘN└¹ė├ČÓé„ĖąŲ„ą┼Žóį┌Ą═ŠSļ[ūā┴┐┐šķgųąīŹĢrūĘ█Öė├æ¶▀\äėĄ─ĘĮĘ©ĪŻįōĘĮĘ©×ķį┌╬’└Ē╚╦ÖCĮ╗╗źŻ©physical human-robot interactionŻ®ųąŻ¼«ö╚╦¾w▀\äė▒╗ć└ųžš┌ō§Č°¤oĘ©ė├å╬ę╗ęĢėXą┼Žó═Ļ│╔ūĘ█ÖĄ─å¢Ņ}Ż¼╠ß╣®┴╦ę╗ĘNĮŌøQĘĮ░ĖĪŻ
ģó┐╝╬─½IŻ║
[1] http://wiki.ros.org/openni_tracker
[2] Cao, Zhe, et al. "Realtimemulti-person 2d pose estimation using part affinity fields." Proceedingsof the IEEE Conference on Computer Vision and Pattern Recognition. 2017
[3] Zhang, Fan, Antoine Cully, andYiannis Demiris. "Personalized robot-assisted dressing using user modelingin latent spaces." 2017 IEEE/RSJ International Conference on IntelligentRobots and Systems (IROS). IEEE, 2017.
▒▄šŽ╩╣ė├Ą─é„ĖąŲ„Ė„ĘNĖ„śėŻ¼Ųõ╠ž³c║═▀mė├ĘČć·ę▓▓╗═¼ĪŻĖ∙ō■▓╗═¼Ą─įŁ└ĒŻ¼┐╔Ęų×ķŻ║│¼┬Ģ▓©é„ĖąŲ„Īó╝t═Ōé„ĖąŲ„Īó╝ż╣Ōé„ĖąŲ„║═ęĢėXé„ĖąŲ„Ą╚
╗∙ė┌ļŖūėŲż─wĄ─▄ø¾wÖCŲ„╚╦é„ĖąĪóÖCŲ„īW┴Ģį┌╚ßąįļŖūėŲż─w╔ŽĄ─æ¬ė├Īóą╬ĀŅĖąų¬Īó├µŽ“▄ø¾wÖCŲ„╚╦Ą─Ę┤ü┐žųŲ║═ÖCŲ„╚╦Ą─▓┘ū„
┼cÖCŲ„╚╦╗źäėĢr蹊┐╚╦Ą─┤¾─Xīóėąų·ė┌Ė³ŪÕ╬·ĪóĖ³╔Ņ╚ļĄž┴╦ĮŌ╚╦ÖCĮ╗╗źŻ¼Å─Č°×ķ╔ńĮ╗ÖCŲ„╚╦Ą─┤║╠ņĄņČ©╗∙ĄAŻ¼īó╔ńĢ■ŠSČ╚š¹║ŽĄĮ╚╦┼c▀@ą®ÖCŲ„Ą─Į╗┴„ųąüĒ╝ė╦┘╚╦┼cÖCŲ„╚╦Ą─Į╗╗źčąŠ┐Ż¼ėąų·ė┌═Ųäėäōįņšµš²Ą─╔ńĮ╗ÖCŲ„╚╦
ÖCŲ„╚╦ī”ŁhŠ│Ą─Ėąų¬┤¾ČÓ═©▀^╝ż╣Ō└ū▀_ĪóözŽ±Ņ^Īó║┴├ū▓©└ū▀_Īó│¼┬Ģ▓©é„ĖąŲ„ĪóGPS▀@╬ÕŅÉé„ĖąŲ„╝░Ųõų«ķgĄ─ĮM║ŽüĒīŹ¼Fūįų„ęŲäė╣”─▄
Į╠ė²Ę■äšÖCŲ„╚╦Ż║ųĖŠ▀ėąĮ╠┼cīWųŪ─▄Ą─Ę■äšÖCŲ„╚╦Ż¼ÖCŲ„╚╦Į╠ė²Ż║─ŻēK╗»ÖCŲ„╚╦║═ÖCŲ„╚╦╠ū╝■╩ŪÖCŲ„╚╦Į╠ė²ųą│ŻęŖ Ą─▌oų·«aŲĘ
Į╠ė²ÖCŲ„╚╦ĮøÜv┴╦Å─Ė┼─ŅŽ╚ąąĄĮārĖ±ĀIõNĄĮ╗žÜwā╚╚▌┼cārųĄ▒Š┘|Ą─░lš╣ļAČ╬ūā▀w
ÖCŲ„╚╦Ėąų¬ŽĄĮy░³└©é„ĖąŲ„Ą─▀xō±║═┼õų├Ż¼ęį╝░╦ŃĘ©║═īŹ¼FŻ¼└¹ė├┴╦ę╗éĆå╬─┐ŽÓÖCŻ¼ę╗éĆČ╠│╠Č■ŠS╝ż╣Ō£yŠÓāxŻ¼▄ć▌åŠÄ┤aŲ„║═æTąį£y┴┐å╬į¬ĪŻ
Ą═╝ē╝╝─▄īW┴Ģ╗“Į©─ŻĄ─╚²ĘNų„ę¬ĘĮĘ©Ż║äėæB▀\äė╗∙į¬(DMP)Ż¼Ė▀╦╣╗ņ║ŽĮ©─Ż┼c╗žÜw(GMM-GMR)Ż¼ļ[±RĀ¢┐ŲĘ“─Żą═Ż©HMMŻ®
╚╦ŅÉĮ╠Ĥ╠ß╣®Ą─╩ŠĮ╠▒╗ė├üĒ═ŲöÓł╠ąąĖ▀╝ē╝╝─▄Ą─ęŌłD,¼F┤·ĘĮĘ©ę▓╩╣ė├╗∙ė┌¬ääŅ║»öĄĄ─ÅŖ╗»īW┴ĢĘĮĘ©üĒīŹ¼FŲ┌═¹─┐ś╦
╠Kų▌ąąš■īÅ┼·ŠųīŹ¼FÖCŲ„╚╦ī¦ė[Ę■äšĪŻ5G Ė▀╦┘╗ź┬ōŠWĮė╚ļĘ■äšĪŻ«ÉĄž│¼Ė▀ŪÕęĢŅl═©įÆ
ė╔ė┌ÖCŲ„ęĢėX┐╔ęį╠ß╣®─┐ś╦╬’Ą─Ņü╔½Īóą╬ĀŅĪó╝y└ĒĪó╔ŅČ╚Ą╚žSĖ╗Ą─ą┼ŽóŻ¼ŪęŠ½Č╚ŽÓ«öĖ▀Ż¼│╔▒ŠŽÓī”▌^Ą═Ż¼ę“┤╦ęį═∙ĻPė┌ų▓╬’Öz£yĄ─蹊┐┤¾ČÓ╗∙ė┌ÖCŲ„ęĢėX
╬õØh┤¾īWč”²łĮ©Į╠╩┌łFĻĀčąųŲ│÷ę╗ĘN├į─Ń▄ø¾wÖCŲ„╚╦Geca-RobotŻ¼Ųõ┐╔Š½£╩┐žųŲĘĮŽ“║═╦┘Č╚Ż¼┐╔į┌ÅUąµ¬M┐pĪó╔·╬’¾wā╚═Ļ│╔Ė„ĘNÅ═ļsū„śI




