
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
▒Ż┴┐▓▀┬įī”(du©¼)ė┌ęĢŅlā╚(n©©i)╚▌üĒšfŻ¼╩Ūę╗ĘN║▄ųžę¬Ą─═ČĘ┼▓▀┬įĪŻą┬¤ßęĢŅlā╚(n©©i)╚▌Č╝ąĶę¬į÷╝ėūį╔ĒĄ─Ųž╣Ō┘Yį┤üĒ▀_(d©ó)ĄĮ▓źĘ┼┴┐ūŅ┤¾╗»Ż¼Č°Ė„ł÷(ch©Żng)Š░Ż©╩ūĒō(y©©)ĪóŅlĄ└Ēō(y©©)Ą╚Ż®Ą─┐é¾w┘Yį┤ėąŽ▐Ūę├┐éĆ(g©©)│ķīŽ┐ė╬╗Ą─╚šŲž╣Ō┘Yį┤ėąŽ▐Ż¼ę“┤╦Ė„ā╚(n©©i)╚▌Ą─Ųž╣Ō┘Yį┤Ęų┼õ┤µį┌Ėé(j©¼ng)ĀÄ(zh©źng)å¢Ņ}ĪŻ┴Ē═ŌŻ¼▓╗═¼ł÷(ch©Żng)Š░ų«ķgŽÓ╗ź¬Ü(d©▓)┴óŻ¼├┐éĆ(g©©)ł÷(ch©Żng)Š░Ė∙ō■(j©┤)ūį╔ĒĄ──┐ś╦(bi©Īo)▀M(j©¼n)ąąą¦┬╩║═¾w“×(y©żn)╔ŽĄ─ā×(y©Łu)╗»Ż¼Ą½╩Ūł÷(ch©Żng)Š░┼cł÷(ch©Żng)Š░ų«ķg┴„┴┐ģf(xi©”)═¼¤oĘ©═©▀^ā×(y©Łu)╗»å╬ę╗ł÷(ch©Żng)Š░üĒ═Ļ│╔ĪŻ

łD1 äĪ╝»ŅlĄ└Ēō(y©©)║═╩ūĒō(y©©)
×ķā╚(n©©i)╚▌Ęų┼õŲž╣Ō┴┐╔µ╝░ĄĮĻP(gu©Īn)ė┌Ųž╣Ō║═³c(di©Żn)ō¶Į©─Żå¢Ņ}Ż¼ęį╝░ā╚(n©©i)╚▌Ą─╬┤üĒ³c(di©Żn)ō¶┴┐ŅA(y©┤)£y(c©©)å¢Ņ}ĪŻā╚(n©©i)╚▌Ųž╣ŌĪó³c(di©Żn)ō¶║═▓źĘ┼Ą╚śŗ(g©░u)│╔┴╦ę╗éĆ(g©©)Å═(f©┤)ļsĄ─ĘŪŠĆąį╗ņŃńŽĄĮy(t©»ng)Ż¼▓╗āH╚ĪøQė┌ā╚(n©©i)╚▌┘|(zh©¼)┴┐▒Š╔ĒŻ¼ę▓╚ĪøQė┌ā╚(n©©i)╚▌Ė³ą┬Ģr(sh©¬)ķgĪóĖ³ą┬▓▀┬į║═ė├涳c(di©Żn)ō¶┴Ģ(x©¬)æTĄ╚ĪŻé„Įy(t©»ng)Ą─Įy(t©»ng)ėŗ(j©¼)ŅA(y©┤)£y(c©©)─Żą═¤oĘ©ĻU╩÷═Ō▓┐Łh(hu©ón)Š│Ą─Ė„ĘNĖ╔ö_ę“╦žęį╝░ŽĄĮy(t©»ng)Ą─╗ņŃń╠žąįŻ¼╝┤¤oĘ©Å─ÖC(j©®)└Ē╔Ž├Ķ╩÷ŽĄĮy(t©»ng)▒Š┘|(zh©¼)ĪŻßśī”(du©¼)┤╦å¢Ņ}Ż¼╬ęéā╩ūŽ╚═©▀^Ęų╬÷ą┬¤ßā╚(n©©i)╚▌Ą─Üv╩ĘŲž╣Ō³c(di©Żn)ō¶╚šųŠŻ¼╩╣ė├│Ż╬óĘųĘĮ│╠Į©┴ó┴╦ą┬¤ßā╚(n©©i)╚▌Ųž╣Ō├¶Ėą─Żą═Ż¼╝┤pv-click-ctr─Żą═Ż©║å(ji©Żn)ĘQP2C─Żą═Ż®ĪŻį┌P2C─Żą═╗∙ĄA(ch©│)╔ŽŻ¼ĮY(ji©”)║ŽĖ„ł÷(ch©Żng)Š░║═│ķīŽĄ─Ųž╣Ō┘Yį┤╝s╩°Ż¼Įo│÷ę╗ĘNŲž╣Ō┘Yį┤╝s╩°Ž┬Ą─ČÓ─┐ś╦(bi©Īo)ā×(y©Łu)╗»▒Ż┴┐┐“╝▄┼c╦ŃĘ©ĪŻ
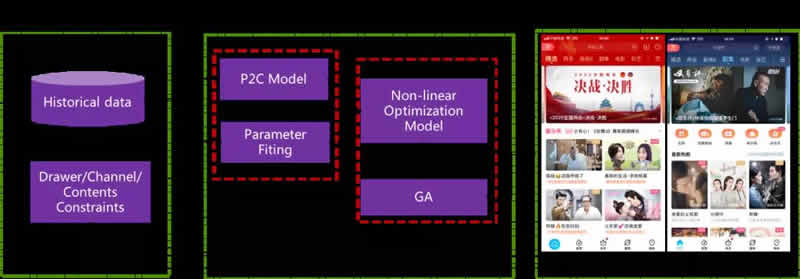
łD2 ▒Ż┴┐▓▀┬į┐“╝▄
Č■ ā╚(n©©i)╚▌Ųž╣Ō├¶ĖąČ╚─Żą═
═©│ŻŪķørŽ┬Ż¼³c(di©Żn)ō¶PVŻ©clickŻ®ļSŲž╣ŌPVį÷┤¾Č°į÷┤¾Ż¼╝┤Ė▀Ųž╣ŌĦüĒĖ▀³c(di©Żn)ō¶ĪŻĄ½╩ŪŻ¼ā╚(n©©i)╚▌Ž¹┘M(f©©i)š▀öĄ(sh©┤)┴┐ėąŽ▐Ż¼Įo═¼ę╗éĆ(g©©)Ž¹┘M(f©©i)š▀ßśī”(du©¼)å╬ę╗ā╚(n©©i)╚▌ųžÅ═(f©┤)Ųž╣Ō▓ó▓╗Ģ■(hu©¼)ĦüĒĖ³ČÓĄ─³c(di©Żn)ō¶┴┐ĪŻ▀@ĘN³c(di©Żn)ō¶Ī░’¢║═Ī▒¼F(xi©żn)Ž¾┐╔Å─ā╚(n©©i)╚▌Ą─Üv╩ĘŲž╣Ō³c(di©Żn)ō¶╚šųŠė^▓ņĄ├ĄĮĪŻ╩▄┤╦¼F(xi©żn)Ž¾åó░l(f©Ī)Ż¼╬ęéāĖ∙ō■(j©┤)ā╚(n©©i)╚▌Ųž╣ŌPV║═³c(di©Żn)ō¶PVÜv╩ĘöĄ(sh©┤)ō■(j©┤)╠ž³c(di©Żn)Ż¼Į©┴óę╗ĘN─▄ē“├Ķ╩÷ā╚(n©©i)╚▌³c(di©Żn)ō¶┴┐ļSŲž╣Ō┴┐ūā╗»┌ģä▌(sh©¼)Ą─│Ż╬óĘųĘĮ│╠Ż©Ordinary Differential Equation, ODEŻ®─Żą═Ż¼╝┤ pv-click-ctr (P2C) ─Żą═Ż¼š¹¾wĮY(ji©”)śŗ(g©░u)╚ńłD3╦∙╩ŠĪŻ

 |
| ÖC(j©®)Ų„╚╦šą╔╠ Disinfection Robot ÖC(j©®)Ų„╚╦╣½╦Š ÖC(j©®)Ų„╚╦æ¬(y©®ng)ė├ ųŪ─▄ßt(y©®)»¤ ╬’┬ō(li©ón)ŠW(w©Żng) ÖC(j©®)Ų„╚╦┼┼├¹ ÖC(j©®)Ų„╚╦Ų¾śI(y©©) ÖC(j©®)Ų„╚╦š■▓▀ Į╠ė²ÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ÖC(j©®)Ų„╚╦ķ_░l(f©Ī) ¬Ü(d©▓)ĮŪ½F Ž¹ČŠÖC(j©®)Ų„╚╦ŲĘ┼Ų Ž¹ČŠÖC(j©®)Ų„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


