╚╦ŅÉĄ─▀M(j©¼n)╗»▀^│╠ųąŻ¼░ķļSų°╣żŠ▀Ą─░l(f©Ī)š╣Ż¼ī”(du©¼)╚╦╩ųĄ─ņ`Ū╔Š½£╩(zh©│n)▓┘ū„─▄┴”ę¬Ū¾ę▓įĮüĒįĮĖ▀Ż¼▀@éĆ(g©©)▀^│╠ę▓ųØuĖ─ūā║═▀M(j©¼n)╗»┴╦┤¾─XĮY(ji©”)śŗ(g©░u)ĪŻČ°╚ń║╬─▄ūīÖC(j©®)Ų„╚╦Ž±╚╦ę╗śėōĒėąņ`Ū╔ļp╩ųŻ¼ę╗ų▒ę▓╩Ū┐ŲīW(xu©”)╝ęéāūĘŪ¾Ą──┐ś╦(bi©Īo)ĪŻ
ų┴╔┘Å─╩«┴∙╩└╝o(j©¼)─®ķ_╩╝Ż¼┐ŲīW(xu©”)║═╣ż│╠ĮńŠ═ę╗ų▒į┌┼¼┴”ķ_░l(f©Ī)ŅÉ╦Ų╚╦╩ųĄ─ĖąėX║═▀\(y©┤n)äė(d©░ng)╣”─▄Ą─ÖC(j©®)ąĄ╩ųŻ¼Ųõųą░³└©▀\(y©┤n)äė(d©░ng)╣”─▄(ūźĪó╬šĪó═ŲĪó└ŁĪó┤“┐ūĪó▓┘ū„Ą╚)║═ĖąėX╣”─▄(ų„äė(d©░ng)║═▒╗äė(d©░ng)Ąž╠Į╦„▒Ē├µĄ─┘|(zh©¼)ĄžĪóرČ╚║═£žČ╚Ż¼ęį╝░š±äė(d©░ng)Īóē║┴”║═┴”Ą─ĖąėXĄ╚)Ż¼▓óūŅĮKą╬│╔╔ńĢ■(hu©¼)╣”─▄(É█ōßĪó═■├{Īó╬š╩ųĪóųĖųĖ³c(di©Żn)³c(di©Żn)ĪóŠ┤ČYĪó═µ╦Ż║═Ė„ĘN╩ųä▌(sh©¼)Ż¼░³└©ūįįĖ║═ĘŪūįįĖ)ĪŻ▒M╣▄╚╦éāī”(du©¼)╩ų╚ń┤╦ų°├įŻ¼Ą½╚į╚╗¤oĘ©═Ļ╚½└ĒĮŌ╦³éāĪŻ▀@ę▓╩Ū×ķ╩▓├┤ÖC(j©®)ąĄ╩ų╚į╚╗╩ŪÖC(j©®)Ų„╚╦╝╝ąg(sh©┤)ųąūŅļyĄ─╠¶æ(zh©żn)ų«ę╗Ą─įŁę“ų«ę╗ĪŻ
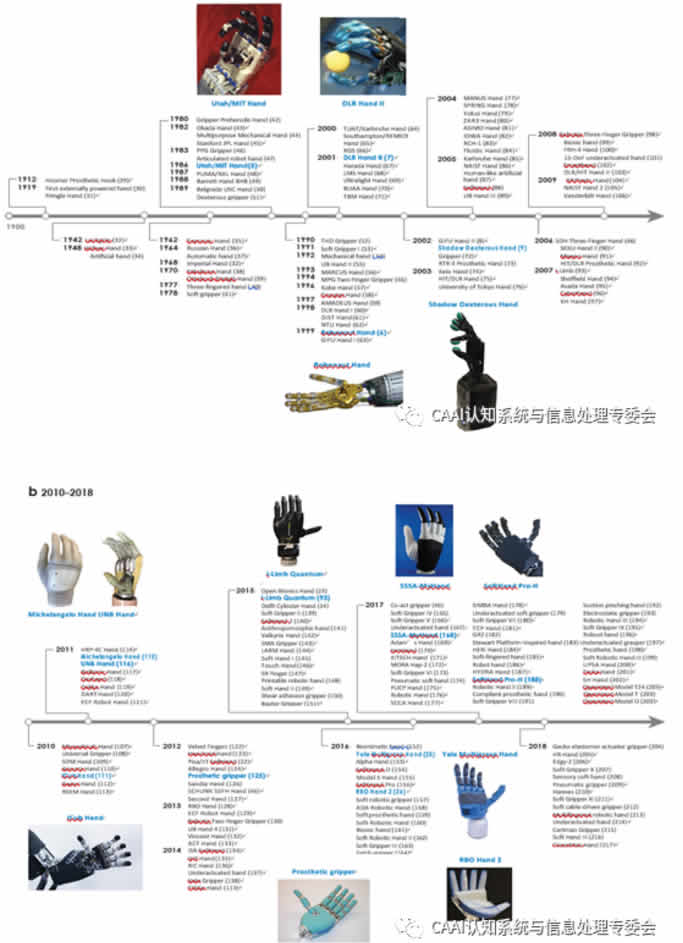
蹊┐╚╦åTįćłD═©▀^Å═(f©┤)ļsĄ─įO(sh©©)ėŗ(j©¼)üĒĘ┬įņ╚╦ŅÉļp╩ųĄ─═Ōė^║═ņ`╗ŅąįŻ¼▓ó╝»│╔┴╦įSČÓ“ī(q©▒)äė(d©░ng)Ų„║═é„ĖąŲ„Ż¼└²╚ń¬q╦¹/MITHĪóRobonautHandĪóDLR(Deutsches Zentrum f©╣r Luft- undRaumfahrt)Hand IIĪóGifu Hand IIĪóShadow Dexterous Hand╝░ŪÕ╚A┤¾īW(xu©”)īOĖ╗┤║łF(tu©ón)ĻĀ(du©¼)ķ_░l(f©Ī)Ą─ŽĄ┴ąņ`Ū╔╩ųĄ╚ĪŻļm╚╗─┐Ū░ėą║▄ČÓīŹ(sh©¬)“×(y©żn)śėÖC(j©®)Ż¼Ą½į┌╣żśI(y©©)ÖC(j©®)Ų„╚╦ĪóĘ■äš(w©┤)ÖC(j©®)Ų„╚╦╔§ų┴╝┘ų½ĘĮ├µŻ¼īŹ(sh©¬)ļHæ¬(y©®ng)ė├öĄ(sh©┤)┴┐╚į╚╗ėąŽ▐ĪŻ×ķ┴╦į÷╝ė═ŲÅVŻ¼Į³─ĻüĒęčĮø(j©®ng)╠ß│÷┴╦ę╗ą®ą┬Ą─ĘĮĘ©║═ĮŌøQĘĮ░ĖŻ¼ęįķ_░l(f©Ī)ėąą¦║═┐╔┐┐Ą─ņ`Ū╔╩ųĪŻ╩┬īŹ(sh©¬)╔ŽŻ¼ļm╚╗īŹ(sh©¬)¼F(xi©żn)┴╦═Ļ├└Ą─ĮY(ji©”)śŗ(g©░u)║═╣”─▄öM╚╦╗»Ī¬Ī¬╝┤▓╗āHį┌═Ōė^╔ŽŻ¼Č°Ūęį┌äė(d©░ng)ū„║═╣”─▄╔Ž┼c╚╦ŅÉĄ─╩ųŽÓ╦ŲŻ©┐╔─▄Ģ■(hu©¼)▀^ė┌Å═(f©┤)ļsŻ®Ż¼Ą½Į³─Ļėą┌ģä▌(sh©¼)ų╝į┌īŹ(sh©¬)¼F(xi©żn)ĘĆ(w©¦n)ĮĪĄ─Īóęūė┌ŠÄ│╠Ą─ĪóĮø(j©®ng)Ø·(j©¼)īŹ(sh©¬)ė├Ą─ņ`Ū╔╩ųŻ¼─▄ē“ł╠(zh©¬)ąą╚╦╩ų▓┘ū„╣”─▄Ą─ūė╝»ĪŻ
╗žŅÖĮ³Äū─ĻĄ─ÖC(j©®)Ų„╚╦▓┘ū„▒╚┘ÉŪķørŻ¼╚ńüå±R▀d▓╔š¬╠¶æ(zh©żn)┘ÉĪóDARPAÖC(j©®)Ų„╚╦╠¶æ(zh©żn)┘ÉĪóIROSÖC(j©®)Ų„╚╦▓┘ū„▒╚┘ÉĄ╚Ż¼┤¾ČÓöĄ(sh©┤)Å═(f©┤)ļsĄ─ūź╚Ī╝╝ąg(sh©┤)Č╝╩▄ĄĮ┴╦╠¶æ(zh©żn)Ż¼▀@ą®▒╚┘É▒Ē├„Ż¼ęį║å╗»įO(sh©©)ėŗ(j©¼)×ķ─┐ś╦(bi©Īo)Ą─ĘĮĘ©─▄ĦüĒ’@ų°Ą─ą¦ęµĪŻĄ┌1ī├üå±R▀d▓╔š¬╠¶æ(zh©żn)┘ÉĄ─½@ä┘š▀╩Ūę╗éĆ(g©©)╗∙ė┌│ķ╬³ŽĄĮy(t©»ng)Ą──®Č╦ą¦æ¬(y©®ng)Ų„Ż╗į┌DARPAÖC(j©®)Ų„╚╦╠¶æ(zh©żn)┘Éųą▓╔ė├Ą─Ę┬╚╦ÖC(j©®)Ų„╚╦Č╝ø]ėą═Ļ╚½“ī(q©▒)äė(d©░ng)Ą─öM╚╦╩ųŻ¼│¼▀^15éĆ(g©©)łF(tu©ón)ĻĀ(du©¼)(25éĆ(g©©)ģó┘Éš▀ųą)╩╣ė├Ą─╩Ūę╗éĆ(g©©)ų╗ėą3╗“4éĆ(g©©)╩ųųĖĄ─Ą═“ī(q©▒)äė(d©░ng)╩ųŻ╗Äū┤╬Ą─IROSÖC(j©®)Ų„╚╦ūź╚Ī║═▓┘┐v▒╚┘ÉųąŻ¼Č╝╩Ū║åęūÖC(j©®)ąĄ╩ų½@╚Ī╣┌▄ŖŻ¼Ę┤Č°╩ŪÅ═(f©┤)ļsČÓ╣”─▄Ą─ņ`Ū╔╩ųį┌▒╚┘Éųą╩¦└¹ĪŻ
į┌▀^╚źĄ─Äū╩«─Ļ└’Ż¼įSČÓÖC(j©®)Ų„╚╦蹊┐ąĪĮMČ╝īŻūóė┌śO║åų„┴xįO(sh©©)ėŗ(j©¼)ĘĮĘ©ĪŻį┌▒Ż┴¶öM╚╦╗»įO(sh©©)ėŗ(j©¼)Ą─įSČÓā×(y©Łu)³c(di©Żn)Ą─═¼Ģr(sh©¬)Ż¼į┌įO(sh©©)ėŗ(j©¼)║═┐žųŲĘĮ├µ▀M(j©¼n)ąąįŁätąįĄ─║å╗»Ż¼┐╔ęį║Ž└ĒĄžĮĄĄ═ŽĄĮy(t©»ng)Ą─Å═(f©┤)ļsČ╚Ż¼░³└©ł╠(zh©¬)ąąŲ„Īóé„ĖąŲ„║═│╠ą“┤·┤aĄ─öĄ(sh©┤)┴┐ĪŻ┤╦═ŌŻ¼▄ø¾wÖC(j©®)Ų„╚╦ĘĮĘ©ę▓║▄ėąė├Ż¼Į³─ĻėąĖ∙ō■(j©┤)▀@śėĄ─įŁ└ĒįO(sh©©)ėŗ(j©¼)Ą─ÖC(j©®)ąĄ╩ųŻ¼į┌ūź╚ĪĄ─═©ė├ąįĪó¶ö░¶ąį║═┐╔┐┐ąįĘĮ├µ╚ĪĄ├┴╦║▄║├Ą─ą¦╣¹ĪŻ
╚╦╣żųŪ─▄╝╝ąg(sh©┤)į┌░▓╚½ŅI(l©½ng)ė“Ą─æ¬(y©®ng)ė├ąĶŪ¾╚šęµŲ╚ŪąŻ¼╚╦╣żųŪ─▄ūį╔ĒĄ─░▓╚½å¢Ņ}ę▓▓╗╚▌ąĪėUŻ¼░▓╚½┼c╚╦╣żųŪ─▄▓ó┼eŻ¼ļpĘĮĄ─╚┌║Ž░l(f©Ī)š╣┼cäō(chu©żng)ą┬╩Ū╬ęÅŖ(qi©óng)ć°æ(zh©żn)┬įųą▓╗┐╔║÷ęĢĄ─ųžę¬ų·═Ųę“╦ž
╬õØh┤¾īW(xu©”)č”²łĮ©Į╠╩┌łF(tu©ón)ĻĀ(du©¼)čąųŲ│÷ę╗ĘN├į─Ń▄ø¾wÖC(j©®)Ų„╚╦Geca-RobotŻ¼Ųõ┐╔Š½£╩(zh©│n)┐žųŲĘĮŽ“║═╦┘Č╚Ż¼┐╔į┌ÅUąµ¬M┐pĪó╔·╬’¾wā╚(n©©i)═Ļ│╔Ė„ĘNÅ═(f©┤)ļsū„śI(y©©)
ė╔ė┌ÖC(j©®)Ų„ęĢėX┐╔ęį╠ß╣®─┐ś╦(bi©Īo)╬’Ą─Ņü╔½Īóą╬ĀŅĪó╝y└ĒĪó╔ŅČ╚Ą╚žSĖ╗Ą─ą┼ŽóŻ¼ŪęŠ½Č╚ŽÓ«ö(d©Īng)Ė▀Ż¼│╔▒ŠŽÓī”(du©¼)▌^Ą═Ż¼ę“┤╦ęį═∙ĻP(gu©Īn)ė┌ų▓╬’Öz£y(c©©)Ą─蹊┐┤¾ČÓ╗∙ė┌ÖC(j©®)Ų„ęĢėX
╠Kų▌ąąš■īÅ┼·ŠųīŹ(sh©¬)¼F(xi©żn)ÖC(j©®)Ų„╚╦ī¦(d©Żo)ė[Ę■äš(w©┤)ĪŻ5G Ė▀╦┘╗ź┬ō(li©ón)ŠW(w©Żng)Įė╚ļĘ■äš(w©┤)ĪŻ«ÉĄž│¼Ė▀ŪÕęĢŅl═©įÆ
╚╦ŅÉĮ╠Ĥ╠ß╣®Ą─╩ŠĮ╠▒╗ė├üĒ═ŲöÓł╠(zh©¬)ąąĖ▀╝ē(j©¬)╝╝─▄Ą─ęŌłD,¼F(xi©żn)┤·ĘĮĘ©ę▓╩╣ė├╗∙ė┌¬ä(ji©Żng)äŅ(l©¼)║»öĄ(sh©┤)Ą─ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)ĘĮĘ©üĒīŹ(sh©¬)¼F(xi©żn)Ų┌═¹─┐ś╦(bi©Īo)
Ą═╝ē(j©¬)╝╝─▄īW(xu©”)┴Ģ(x©¬)╗“Į©─ŻĄ─╚²ĘNų„ę¬ĘĮĘ©Ż║äė(d©░ng)æB(t©żi)▀\(y©┤n)äė(d©░ng)╗∙į¬(DMP)Ż¼Ė▀╦╣╗ņ║ŽĮ©─Ż┼c╗žÜw(GMM-GMR)Ż¼ļ[±RĀ¢┐ŲĘ“─Żą═Ż©HMMŻ®
ÖC(j©®)Ų„╚╦Ėąų¬ŽĄĮy(t©»ng)░³└©é„ĖąŲ„Ą─▀xō±║═┼õų├Ż¼ęį╝░╦ŃĘ©║═īŹ(sh©¬)¼F(xi©żn)Ż¼└¹ė├┴╦ę╗éĆ(g©©)å╬─┐ŽÓÖC(j©®)Ż¼ę╗éĆ(g©©)Č╠│╠Č■ŠS╝ż╣Ō£y(c©©)ŠÓāxŻ¼▄ć▌åŠÄ┤aŲ„║═æTąį£y(c©©)┴┐å╬į¬ĪŻ
Į╠ė²ÖC(j©®)Ų„╚╦Įø(j©®ng)Üv┴╦Å─Ė┼─ŅŽ╚ąąĄĮār(ji©ż)Ė±ĀIõNĄĮ╗žÜwā╚(n©©i)╚▌┼cār(ji©ż)ųĄ▒Š┘|(zh©¼)Ą─░l(f©Ī)š╣ļAČ╬ūā▀w
Į╠ė²Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ż║ųĖŠ▀ėąĮ╠┼cīW(xu©”)ųŪ─▄Ą─Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ż¼ÖC(j©®)Ų„╚╦Į╠ė²Ż║─ŻēK╗»ÖC(j©®)Ų„╚╦║═ÖC(j©®)Ų„╚╦╠ū╝■╩ŪÖC(j©®)Ų„╚╦Į╠ė²ųą│ŻęŖ Ą─▌oų·«a(ch©Żn)ŲĘ
ÖC(j©®)Ų„╚╦ī”(du©¼)Łh(hu©ón)Š│Ą─Ėąų¬┤¾ČÓ═©▀^╝ż╣Ō└ū▀_(d©ó)ĪóözŽ±Ņ^Īó║┴├ū▓©└ū▀_(d©ó)Īó│¼┬Ģ▓©é„ĖąŲ„ĪóGPS▀@╬ÕŅÉé„ĖąŲ„╝░Ųõų«ķgĄ─ĮM║ŽüĒīŹ(sh©¬)¼F(xi©żn)ūįų„ęŲäė(d©░ng)╣”─▄
┼cÖC(j©®)Ų„╚╦╗źäė(d©░ng)Ģr(sh©¬)蹊┐╚╦Ą─┤¾─Xīóėąų·ė┌Ė³ŪÕ╬·ĪóĖ³╔Ņ╚ļĄž┴╦ĮŌ╚╦ÖC(j©®)Į╗╗źŻ¼Å─Č°×ķ╔ńĮ╗ÖC(j©®)Ų„╚╦Ą─┤║╠ņĄņČ©╗∙ĄA(ch©│)Ż¼īó╔ńĢ■(hu©¼)ŠSČ╚š¹║ŽĄĮ╚╦┼c▀@ą®ÖC(j©®)Ų„Ą─Į╗┴„ųąüĒ╝ė╦┘╚╦┼cÖC(j©®)Ų„╚╦Ą─Į╗╗źčąŠ┐Ż¼ėąų·ė┌═Ųäė(d©░ng)äō(chu©żng)įņšµš²Ą─╔ńĮ╗ÖC(j©®)Ų„╚╦
╗∙ė┌ļŖūėŲż─wĄ─▄ø¾wÖC(j©®)Ų„╚╦é„ĖąĪóÖC(j©®)Ų„īW(xu©”)┴Ģ(x©¬)į┌╚ßąįļŖūėŲż─w╔ŽĄ─æ¬(y©®ng)ė├Īóą╬ĀŅĖąų¬Īó├µŽ“▄ø¾wÖC(j©®)Ų„╚╦Ą─Ę┤ü┐žųŲ║═ÖC(j©®)Ų„╚╦Ą─▓┘ū„






