╚╦ą╬ÖCŲ„╚╦į┌é„Įy(t©»ng)ÖCŲ„╚╦╗∙ĄA(ch©│)╔Žėą▌^┤¾Ą─╝╝ąg(sh©┤)┐ńįĮŻ¼─┐Ū░ų„ꬊ█Į╣ė┌▀\äė┐žųŲ─▄
┴”Ą─╠ß╔²ĪŻ
ķLŲ┌üĒ┐┤Ż¼╚╦ą╬ÖCŲ„╚╦ėąĖ³ÅŖĄ─╚ßąį╗»╦«ŲĮŻ¼Ė³║├Ą─Łh(hu©ón)Š│Ėąų¬─▄┴”║═
┼ąöÓ─▄┴”Ż¼į┌▀\äė┐žųŲ─▄┴”ĪóŁh(hu©ón)Š│Ėąų¬─▄┴”║═╚╦ÖCĮ╗╗ź─▄┴”╔ŽŠ∙ąĶę¬ėą▌^┤¾Ą─═╗ŲŲĪŻ─┐Ū░╚╦ą╬ÖCŲ„╚╦╩ūꬹĶę¬ĮŌøQĄ─å¢Ņ}╩Ū╚ń║╬īŹ¼F(xi©żn)Ž±╚╦ę╗śė╚ź▀\äėŻ¼▓óŪę─▄ē“╝µŅÖ┐╔┐┐ąįĪó│╔▒ŠĄ─ę“╦žŻ¼╚╦ÖCĮ╗╗źĪóŁh(hu©ón)Š│Ėąų¬Ą╚Łh(hu©ón)╣Ø(ji©”)ę▓Ģ■į┌╬┤üĒķLŲ┌░l(f©Ī)š╣ų«ųą
ų▓Į═Ļ╔ŲĪŻ
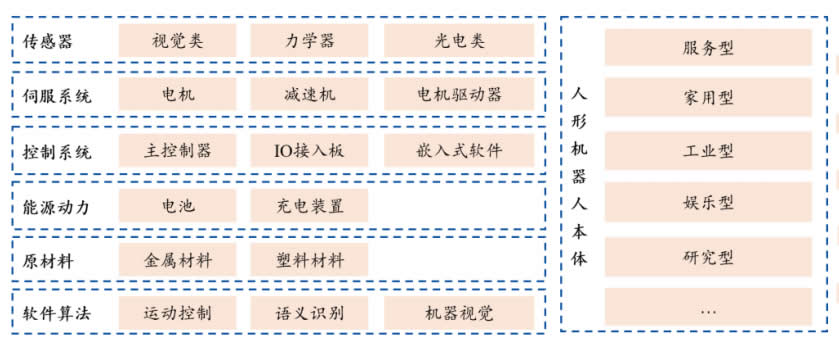
╚╦ą╬ÖCŲ„╚╦«a(ch©Żn)śI(y©©)µ£┼c╣żśI(y©©)ÖCŲ„╚╦«a(ch©Żn)śI(y©©)µ£ėąę╗Č©ŽÓ╦ŲąįŻ¼╔Žė╬╩Ū║╦ą─┴Ń▓┐╝■ęį╝░ AI
┼õ╠ū╗∙ĄA(ch©│)įO(sh©©)éõ┼c╝╝ąg(sh©┤)Ż¼ųąė╬×ķÖCŲ„╚╦╔·«a(ch©Żn)║═╝»│╔╔╠Ż¼Ž┬ė╬×ķĖ„ĘNæ¬(y©®ng)ė├ŅI(l©½ng)ė“ĪŻ║╦ą─
┴Ń▓┐╝■░³└©£p╦┘ÖCĪóé„ĖąŲ„ĪóļŖÖCĪó▀\äė┐žųŲŲ„Ą╚ĪŻ
28éĆł╠(zh©¬)ąąŲ„Ęųäe×ķ╝ńĻP(gu©Īn)╣Ø(ji©”)(å╬é╚(c©©)╚²ūįė╔Č╚ą²▐D(zhu©Żn)ĻP(gu©Īn)╣Ø(ji©”))6éĆ,ųŌĻP(gu©Īn)╣Ø(ji©”)(å╬é╚(c©©)ų▒ŠĆĻP(gu©Īn)╣Ø(ji©”))2éĆ,═¾▓┐ĻP(gu©Īn)╣Ø(ji©”)(å╬é╚(c©©)2éĆų▒ŠĆ+1éĆą²▐D(zhu©Żn))6éĆ,č³▓┐(Č■ūįė╔Č╚ą²▐D(zhu©Żn)ĻP(gu©Īn)╣Ø(ji©”))2éĆ
¤o┐“┴”ŠžļŖÖCø]ėą═ŌÜż,┐╔ęį╠ß╣®Ė³┤¾Ą─įO(sh©©)éõ┐š ķg,ųąķg╩Ūųą┐šą╬╩ĮĄ─,▒Ńė┌ū▀ŠĆ;į┌įO(sh©©)ėŗųą,┐╔ęį╩╣š¹éĆÖCŲ„¾wĘeĖ³ąĪ,ę“┤╦┐╔ęį╠ß╣®Ė³┤¾Ą─╣”┬╩├▄Č╚▒╚
ą═╦┼Ę■“ī(q©▒)äėŲ„ėą╚²ĘNŅÉą═,Ęųäe×ķ│ŻęÄ(gu©®)╦┼Ę■“ī(q©▒)äėŲ„,SEA ╦┼Ę■“ī(q©▒)äėŲ„,▒Š¾w╦┼Ę■“ī(q©▒)äėŲ„;ų„ę¬ė╔┴”ŠžļŖÖC,ųC▓©£p╦┘Ų„,ļŖÖCŠÄ┤aŲ„,▌ö│÷ŠÄ┤aŲ„,“ī(q©▒)äė░Õ,ųŲäėŲ„ĮM│╔
┐žųŲŽĄĮy(t©»ng)Ė∙ō■(j©┤)ųĖ┴Ņ╝░é„Ėąą┼ŽóŻ¼Ž““ī(q©▒)äėŽĄĮy(t©»ng)░l(f©Ī)│÷ųĖ┴ŅŻ¼┐žųŲŲõ═Ļ│╔ęÄ(gu©®)Č©Ą─▀\äė,┐žųŲŽĄĮy(t©»ng)ų„ę¬ė╔┐žųŲŲ„Ż©ė▓╝■Ż®║═┐žųŲ╦ŃĘ©Ż©▄ø╝■Ż®ĮM│╔
ļŖÖC“ī(q©▒)äė┐žųŲ╩ųČ╬Ž╚▀M,╦┘Č╚Ę┤ü╚▌ęū,Į^┤¾▓┐ĘųÖCŲ„╚╦╩╣ė├ļŖÖC“ī(q©▒)äė;ę║ē║“ī(q©▒)äė¾wĘeąĪųž┴┐▌p,╩ŪÖCŲ„╚╦Atlas╩╣ė├Ą─“ī(q©▒)äėĘĮ░Ė;ÜŌäė“ī(q©▒)äė░▓╚½ąįĖ▀,æ¬(y©®ng)ė├ė┌Ę┬╔·ÖCŲ„╚╦Ą╚
Ė∙ō■(j©┤)─▄┴┐▐D(zhu©Żn)ōQĘĮ╩ĮĄ─▓╗═¼Ż¼ÖCŲ„╚╦Ą─“ī(q©▒)äėĘĮ╩Į┐╔Ęų×ķļŖÖC“ī(q©▒)äėĪóę║ē║“ī(q©▒)äėĪóÜŌäė“ī(q©▒)äėĄ╚;¼F(xi©żn)ėąĄ─Į^┤¾ČÓöĄ(sh©┤)╚╦ą╬ÖCŲ„╚╦▓╔ė├ļŖÖC“ī(q©▒)äė
Ę┬╚╦ą╬ÖCŲ„╚╦╝╚ąĶ꬜OÅŖĄ─▀\äė┐žųŲ─▄┴”,Ųõ║╦ą─ śŗ(g©░u)│╔░³└©“ī(q©▒)äėčbų├(╦┼Ę■ŽĄĮy(t©»ng)+£p╦┘Ų„),┐žųŲčbų├(┐žųŲŲ„)║═Ė„ŅÉé„ĖąŲ„,öĄ(sh©┤)┴┐║═┘|(zh©¼)┴┐ę¬Ū¾┐╔─▄Ė³Ė▀
¼F(xi©żn)ļAČ╬Ą─╚╦ą╬ÖCŲ„╚╦ęčĮø(j©®ng)┐╔ęįĘĆ(w©¦n)Č©ĄžļpūŃąąū▀,īŹ¼F(xi©żn)┴╦ūįäėī¦(d©Żo)║Į▒▄šŽ╣”─▄,┐╔ęį╗∙ė┌Ėąų¬ą┼Žó▀Mąąę╗Č©│╠Č╚Ą─ūįų„ąąäė
╚╦ą╬ÖCŲ„╚╦Digitų„ę¬×ķ╬’┴„ł÷Š░įO(sh©©)ėŗ,┐╔ęį─├Ų║═Čč»B18kgųžĄ─ŽõūėŻ¼▀MąąęŲäė░³╣³ĪóąČžøĄ╚╣żū„Ż¼ Ī░ūŅ║¾ę╗ ╣½└’Ī▒┼õ╦═╣”─▄ę▓š²į┌ķ_░l(f©Ī)«ö(d©Īng)ųą
Å═(f©┤)ļsĄžą╬ūį▀mæ¬(y©®ng)ŲĮĘĆ(w©¦n)┐ņ╦┘ąąū▀ U-SLAMęĢėXī¦(d©Żo)║Įūįų„┬ĘÅĮęÄ(gu©®)äØ ╩ųč█ģf(xi©”)š{(di©żo)▓┘ū„Š½£╩(zh©│n)ņ`╗ŅĘ■äš(w©┤) ČÓ─ŻæB(t©żi)ŪķĖąĮ╗╗źĘ┬╚╦╣▓Ūķ▒Ē▀_ äėæB(t©żi)ūŃ═╚┐žųŲūįŲĮ║Ō┐╣Ė╔ö_
ÖCŲ„╚╦HUBOęįų▒═╚æB(t©żi)ąąū▀,Ė³ĮėĮ³╚╦Ą─▓ĮæB(t©żi);╚½╔Ēėą34éĆūįė╔Č╚,ū¾ėę╩ųĘųäeėą3,4éĆ╩ųųĖ,┐╔ęį▓┘┐vĘĮŽ“▒P,┼╩┼└╠▌ūėĄ╚,│¼▀^Atlas┌AĄ├┴╦DARPAÖCŲ„╚╦╠¶æ(zh©żn)┘É╣┌▄Ŗ
▓©╩┐ŅDäė┴”╣½╦Šų┬┴”ė┌čą░l(f©Ī)Š▀ėąņ`╗Ņ▀\äė─▄┴”Ą─ČÓūŃÖCŲ„╚╦,ų„ę¬░³└©╦─ūŃÖCŲ„╣ĘSpotŻ©ė├ė┌╣żśI(y©©)č▓ÖzĄ╚ł÷Š░Ż®║═ĦÖCąĄ▒█Ą─ęŲäėÖCŲ„╚╦Stretch






