╠ž╦╣└Ł Optimus ÖCŲ„╚╦Ą─ 3D é„Ėą─ŻēKęįČÓ─┐ęĢėX×ķų„Ż¼Ņ^▓┐╩╣ė├╚²ŅwAutopilot özŽ±Ņ^ū„×ķĖąų¬ŽĄĮyŻ║Left/RightPillarCameraū¾╝ń/ėę╝ńözŽ±Ņ^Ż¼║═
FisheyeCamera ųąčļ¶~č█özŽ±Ņ^Ż¼╠ß╣®┤¾ė┌180Č╚¾wŪ░ł÷Š░Ė▓╔wĪŻį┌▓╔╝»ą┼Žó
║¾Ż¼═©▀^ÅŖ┤¾Ą─╔±ĮøŠWĮj╠Ä└Ē║═ūRäe▓╗═¼╚╬䚯¼ę└┐┐ŲõąžŪ╗ā╚▓┐┤Ņ▌dĄ─ FSD ╚½╠ū
ėŗ╦ŃÖC═Ļ│╔ĪŻ
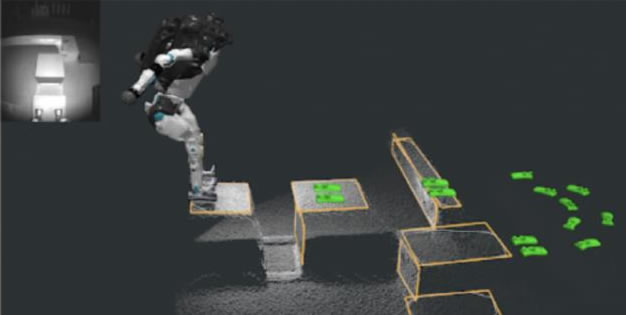
▓©╩┐ŅDäė┴”Ą─ Atlas Ņ^▓┐ėąā╔éĆözŽ±Ņ^Ż¼ę╗éĆ╩Ū▓╩╔½ŽÓÖCŻ¼┴Ēę╗éĆät╩Ū TOF
╔ŅČ╚ŽÓÖCĪŻAtlas ╩╣ė├ TOF ╔ŅČ╚ŽÓÖCęį├┐├ļ 15 ļĄ─╦┘Č╚╔·│╔ŁhŠ│Ą─³cįŲŻ¼³cįŲ
╩Ū£yŠÓĄ─┤¾ęÄ─Ż╝»║ŽĪŻAtlas Ą─Ėąų¬▄ø╝■╩╣ė├ę╗ĘN├¹×ķČÓŲĮ├µĘųĖŅĄ─╦ŃĘ©Å─³cįŲųą╠ß╚ĪŲĮ├µĪŻČÓŲĮ├µĘųĖŅ╦ŃĘ©Ą─▌ö╚ļü╚ļĄĮę╗éĆė│╔õŽĄĮyųąŻ¼įōŽĄĮy×ķ Atlas ═©
▀^ŽÓÖC┐┤ĄĮĄ─Ė„ĘN▓╗═¼ī”Ž¾śŗĮ©─Żą═Ż¼Atlas į┘╗∙ė┌╦³śŗĮ©Ą──Żą═üĒęÄäØ┬ĘÅĮĪŻ
CyberOneÖCŲ„╚╦┤Ņ▌dĄ─Mi-Sense╔ŅČ╚ęĢėX─ŻĮM,«aŲĘį┌£y┴┐ĘČć·ā╚Š½Č╚Ė▀▀_1%,ØMūŃ╝ż╣Ō░▓╚½ Class1 ś╦£╩,ōĒėą═Ļš¹Ą─╚²ŠS┐šķgĖąų¬─▄┴”
WALKERX▓╔ė├╗∙ė┌ČÓ─┐ęĢėXé„ĖąŲ„Ą─╚²ŠS┴ó¾węĢėXČ©╬╗,▓╔ Coarse-to-fineĄ─ČÓīėęÄäØ╦ŃĘ©,īŹ¼FäėæBł÷Š░Ž┬╚½ŠųūŅā×┬ĘÅĮūįų„ī¦║Į
Č©╬╗╣”─▄ų„ę¬æ¬ė├ė┌╝ė╣żįOéõ╣żŠ▀Č╦Ą─┬ĘÅĮę²ī¦;╬’┴„ś╦║×ūx╚Ī║═ūųĘ¹ūRäe╩ŪūRäe╣”─▄ūŅų▒ĮėĄ─Ę■äšī”Ž¾;£y┴┐╣”─▄ų„ę¬æ¬ė├ė┌ī”─┐ś╦╬’¾wĄ─Ė▀╦┘ Ė▀Š½£y┴┐
ę╩─ŽŠWĖ±╗»App╩Ūę╩─Ž┐h╔ńĢ■ų╬└Ēą┼ŽóŲĮ┼_Ą─╩ųÖCæ¬ė├,┐╔ęį×ķ╩│ŲĘ╦ÄŲĘ▒O╣▄┤ŅĮ©ą┬─Ż╩Į,š{äėśI╬»Ģ■,╬’śI╣½╦Š,ąĪģ^ŠWĖ±åT,ĮųŽ’ŠWĖ±åTĄ╚ģó┼c╩│ŲĘ╦ÄŲĘ░▓╚½ų╬└Ē
PLC┐žųŲŲ„ė├ė┌łAų▄▀\äė╗“ų▒ŠĆ▀\äėĄ─┐žųŲ;ŪČ╚ļ╩Į┐žųŲŲ„║Ł╔wÅ─║åå╬ĄĮÅ═ļsĄ─Ė„ĘN▀\ė├;ŠWĮj╩Į┐žųŲŲ„┼c╦┼Ę■“īäė ĮyĄ─µ£Įė╩Ū▓╔ė├Ė„ŅÉ╣żśI┐éŠĆą╬╩Į
ųąć°ÖCŲ„ęĢėX╝╝ągį┌╣żśIŅIė“æ¬ė├▌^ČÓ,«aśIĘų▓╝┼cųąć°ųŲ įņśI░l▀_Ąžģ^Ą─Ąž└Ē╬╗ų├┬ōŽĄ▌^Šo├▄,į┌ÅV¢|╩ĪĪóĮŁšŃ£¹Ą╚ Ąžģ^▌^╝»ųą,šQ╔·┴╦ČÓéĆųąć°ÖCŲ„ęĢėX«aśIµ£╔Žųąė╬²łŅ^Ų¾śI
┼cRV╝░Ųõ╦¹Š½├▄£p╦┘Ų„ŽÓ ▒╚,ųC▓©£p╦┘Ų„╩╣ė├Ą─▓─┴Ž,¾wĘe╝░ ųž┴┐┤¾Ę∙Č╚Ž┬ĮĄ;Š½Č╚═∙═∙▓╗╝░ųC▓©£p╦┘Ų„,ę╗░Ńæ¬ė├ė┌ČÓĻP╣ØÖCŲ„╚╦ųąÖCū∙
ųC▓©£p╦┘Ų„╩Ūę╗ĘN┐┐▓©░l╔·Ų„╩╣╚ß▌å«a╔·┐╔┐žĄ─ÅŚąįūāą╬▓©,Ų„Š▀ėąå╬╝ēé„äė▒╚┤¾,¾wĘeąĪ,┘|┴┐ąĪ,▀\äėŠ½Č╚Ė▀Ą╚╠žš„;RV£p╦┘Ų„╩Ū╩Ūą²▐D╩Ė┴┐Ż©Rotary VectorŻ®£p╦┘Ų„Ą─║åĘQ
╚╦ą╬ÖCŲ„╚╦Ą─ÖCąĄśŗįņÅ═ļs│╠Č╚Č╝▀hĖ▀ė┌¼FėąĄ─ÖCŲ„╚╦,Ė∙ō■Ė„▓┐╬╗▀\äėąĶŪ¾śŗĮ©ł╠ąąŠ½Č╚Ė▀Ą─“īäėŽĄĮyķ_░lŠ▀ėąĖ▀Č╚ĘĆČ©ąį║═▀mæ¬ąįĄ─┐žųŲŽĄĮy
ę╗ĘNė├ė┌ÖCąĄ▒█Ą──®Č╦▀BŚUčbų├,░³└©─®Č╦▀BŚUų„¾w,─®Č╦▀BŚUų„¾wįOų├į┌ÖCąĄ▒█Ą─▌ö│÷Č╦;ų┴╔┘ę╗éĆ╬š│ų▓┐Ż¼╬š│ų▓┐─▄ē“▒╗╬š│ų,┼c─®Č╦▀BŚUų„¾wę╗¾wĄžą╬│╔
SLAM╩Ū╝┤ĢrČ©╬╗┼cĄžłDśŗĮ©,ų„ę¬ė├ė┌ĮŌøQÖCŲ„╚╦į┌ īŹļHŁhŠ│ųąĄ─Č©╬╗┼c▀\äėī¦║Įå¢Ņ};įŲŲĮ┼_×ķÖCŲ„╚╦╠ß╣®Ė³┤¾Ą─ą┼Žó┤µā”┐šķg║═ │¼ÅŖĄ─ėŗ╦Ń─▄┴”
ąŠŲ¼ų„꬞ōž¤ÖCŲ„╚╦ū„śIĄ─öĄō■ėŗ╦Ń║═ųĖ┴ŅŽ┬▀_;┐žųŲŲ„ų„꬞ōž¤░l▓╝║═é„▀fäėū„ųĖ┴Ņ;╦┼Ę■ȵÖCų„ę¬ė├ė┌“īäėÖCŲ„╚╦Ą─ĻP╣Ø;£p╦┘Ų„ų„ę¬░▓čbį┌ÖCŲ„╚╦ĻP╣Ø╠Ä




