
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
▓┐Ęųņ`Ū╔╩ų▓╔ė├“īäėŲ„═Ōų├║═ā╚ų├ŽÓĮY║ŽĄ─ĘĮ╩ĮŻ¼▀@ĘNįOėŗ┐╔ęį╠ßĖ▀╩ųųĖĄ─▌ö│÷┴”ŠžŻ¼▒ŻūC▌^Ė▀ūįė╔Č╚Ą─═¼ĢrŻ¼┐žųŲ¾wĘe┤¾ąĪĪŻ└²╚ńęŌ┤¾└¹Ą─ iCub ║═Ēnć°Ą─ RoboRay ņ`Ū╔╩ųĪŻ
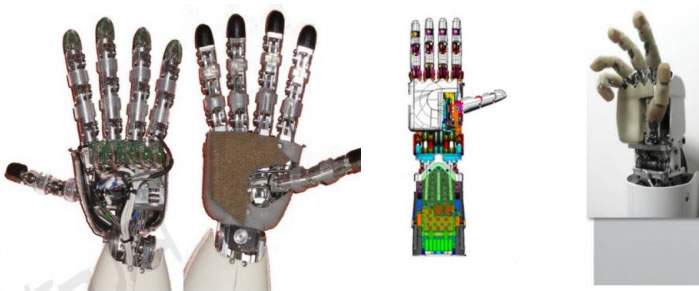
ęŌ┤¾└¹ iCub ņ`Ū╔╩ųėą 20 éĆ╗ŅäėĻP╣ØĪó9 éĆūįė╔Č╚ĪŻ9 éĆļŖÖCų╗ėą 2 éĆ╝»│╔į┌╩ųšŲā╚Ż¼ ┴Ē═Ō 7 éĆ╝»│╔į┌Ū░▒█└’ĪŻ
Ēnć°╚²ąŪ╣½╦Š 2014 ─ĻčąųŲ┴╦ RoboRay ņ`Ū╔╩ųŻ¼įō╩ųŠ▀ėą╬ÕĖ∙╩ųųĖŻ¼12 éĆūįė╔Č╚Ż¼7 éĆ┤¾▌d║╔Ą─“īäėŲ„Ę┼ų├į┌Ū░▒█ā╚Ż¼╠ß╣®ų„ꬥ─ūź╚Ī┴”Ż¼īŹ¼F░³Įjūź╚ĪŻ¼▓óīó 5 éĆąĪ▌d ║╔Ą─“īäėŲ„Ę┼ų├į┌╩ųšŲā╚Ż¼ė├üĒĖ─ūā╩ųųĖū╦æBŻ¼īŹ¼FŠ½┤_ūź╚ĪĪŻ
╗ņ║Žų├╩Įņ`Ū╔╩ųīóę╗▓┐Ęų“īäėŲ„Ę┼į┌╩ų▒█Ż¼╝╚▒ŻūC┴╦“īäė┴”Ż¼ę▓ĮĄĄ═┴╦ņ`Ū╔╩ų▒Š¾wĄ─¾wĘeŻ¼ ╩╣Ą├ņ`Ū╔╩ųĖ³╝ėöM╚╦╗»ĪŻ═¼ĢrŻ¼ņ`Ū╔╩ų▒Š¾wā╚ų├ę╗▓┐Ęų“īäėŲ„Ż¼ę▓ėą└¹ė┌é„ĖąŲ„Ą─ų▒Įė£y ┴┐ĪŻĄ½┴Ēę╗ĘĮ├µŻ¼╗ņ║Žų├ņ`Ū╔╩ų╚į╚╗Š▀ėą═Ōų├╩ĮĄ─╚▒³cŻ¼└²╚ńąĶę¬ĮĶų·ļņ└Ké„äėŻ¼į÷╝ė┴╦ ŠSą▐ļyČ╚ĪŻÅ─╬┤üĒĄ─░lš╣┌ģä▌╔Ž┐┤Ż¼ļSų°╬ó“īäėĪó╬óé„äėŲ„╝■╝╝ąg╠ß╔²Ż¼ČÓųĖņ`Ū╔╩ųĄ─čą Š┐īóĢ■Ž“ų°─ŻēK╗»Īó╬óÖCļŖ╝»│╔╗»ĘĮŽ“░lš╣ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ Ž¹ČŠÖCŲ„╚╦ārĖ± š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ║╦╦ß▓╔śėÖCŲ„╚╦ ÖCŲ„╚╦┤·╣żÅS ųŪ─▄┼õ╦═ÖCŲ„╚╦ ćŖņFŽ¹ČŠÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ Ž¹ÜóÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


