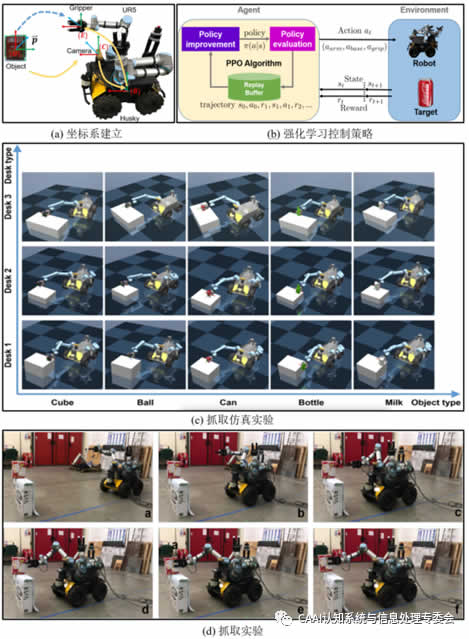
ųą┐Ųį║╔“Ļ¢ūįäė(d©░ng)╗»╦∙Ą─Wang└¹ė├╔ŅČ╚ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)╦ŃĘ©║═ęĢėXĖąų¬ŽÓĮY(ji©”)║ŽĄ─ĘĮĘ©üĒ═Ļ│╔ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦(╚ńłD3(a))į┌ĘŪĮY(ji©”)śŗ(g©░u)Łh(hu©ón)Š│Ž┬Ą─ęŲäė(d©░ng)▓┘ū„[7]ĪŻū„š▀īóęŲäė(d©░ng)▓┘ū„▀^│╠┐┤ū÷ę╗éĆ(g©©)ś╦(bi©Īo)£╩(zh©│n)Ą─ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)å¢Ņ}Ż¼╩ūŽ╚═©▀^ļp─┐ŽÓÖC(j©®)═©▀^DOPE½@╚Ī─┐ś╦(bi©Īo)╬’¾wĄ─6Dū╦æB(t©żi)pęį╝░ÖC(j©®)Ų„╚╦▒Š¾wĄ─«ö(d©Īng)Ū░ĀŅæB(t©żi)st,Įėų°═©▀^╗∙ė┌PPOĄ─ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)╦ŃĘ©ŅA(y©┤)£y(c©©)ÖC(j©®)Ų„╚╦Ą─▒Š¾wŻ¼ÖC(j©®)ąĄ▒█ęį╝░ÖC(j©®)ąĄ╩ųĄ─▀\(y©┤n)äė(d©░ng)▓ó┐žųŲÖC(j©®)Ų„╚╦▒Š¾w▀\(y©┤n)äė(d©░ng)Ż¼ūŅ║¾ÖC(j©®)Ų„╚╦Ą─▀\(y©┤n)äė(d©░ng)ĀŅæB(t©żi)st+1║═Ēææ¬(y©®ng)rtŻ¼ŲõųąĒææ¬(y©®ng)ų„ę¬░³║¼┴╦š¹éĆ(g©©)ŽĄĮy(t©»ng)Ą─┐žųŲĒææ¬(y©®ng)rctrlĪóÖC(j©®)ąĄ╩ų─®Č╦Ą─╬╗ų├Ēææ¬(y©®ng)rdistęį╝░ūź╚ĪĀŅæB(t©żi)rgrasp(╚ńłD3(b))ĪŻūŅ║¾ū„š▀į┌Ę┬šµŁh(hu©ón)Š│║═šµīŹ(sh©¬)Łh(hu©ón)Š│Ž┬£y(c©©)įć┴╦▓╗═¼Ė▀Č╚Ž┬Ą─ūź╚Ī│╔╣”┬╩Ż¼į┌Ę┬šµųąŻ¼┴óĘĮ¾wĄ─ūź╚Īą¦╣¹ūŅ║├▀_(d©ó)ĄĮ┴╦90%Ą─│╔╣”┬╩Ż¼Č°Ū“ŅÉ╬’¾w▌^▓ŅāHėą60%ū¾ėęŻ¼Č°į┌īŹ(sh©¬)ļH£y(c©©)įć▀^│╠ųąŻ¼į┌ū╦æB(t©żi)╣└ėŗ(j©¼)š²┤_Ą─Ū░╠ߎ┬┐╔īŹ(sh©¬)¼F(xi©żn)─┐ś╦(bi©Īo)╬’¾wĄ─│╔╣”ūź╚Ī(╚ńłD3(c)(d))ĪŻ
į┌Ąūīė═©▀^╩╣ė├╗∙ė┌─Żą═Ą─▓┘ū„å╬į¬Ż¼▒ŻūC┴╦╩ųųĖ┼c╬’¾wų«ķg│ų└m(x©┤)ĘĆ(w©¦n)Č©Ą─ūź╚ĪŻ╗į┌ųąīė╩╣ė├ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)▀M(j©¼n)ąąęÄ(gu©®)äØŻ¼Å─Č°īŹ(sh©¬)¼F(xi©żn)▌^ķL(zh©Żng)║═Å═(f©┤)ļsĄ─╩ųā╚(n©©i)▓┘ū„┴„│╠
╚╦ŅÉ┐╔ęį═©▀^ęĢėX║═ė|ėX╚┌║ŽĖąų¬┐ņ╦┘┤_Č©ūź╚Ī┐╔ūāą╬╬’¾w╦∙ąĶ┴”Ą─┤¾ąĪŻ¼ęįĘ└ų╣Ųõ░l(f©Ī)╔·╗¼äė(d©░ng)╗“▀^Č╚ą╬ūāŻ¼Ą½▀@ī”(du©¼)ė┌ÖC(j©®)Ų„╚╦üĒšf╚į╚╗╩Ūę╗éĆ(g©©)Š▀ėą╠¶æ(zh©żn)ąįĄ─å¢Ņ}
─▄┐ņ╦┘īó¼F(xi©żn)ėą╦ŃĘ©į┌īŹ(sh©¬)ļH╔·«a(ch©Żn)Łh(hu©ón)Š│┬õĄžŻ¼▓ó─▄└¹ė├GPU╝ė╦┘īŹ(sh©¬)¼F(xi©żn)┤¾ęÄ(gu©®)─Żėŗ(j©¼)╦ŃŻ¼╬ęéāūį╝║┤ŅĮ©┴╦ę╗éĆ(g©©)GPU╝ė╦┘Ą─┤¾ęÄ(gu©®)─ŻĘų▓╝╩ĮÖC(j©®)Ų„īW(xu©”)┴Ģ(x©¬)ŽĄĮy(t©»ng)Ż¼╚Ī├¹ąĪųTĖ
Č┼┐╦┤¾īW(xu©”)Ą─ę╗ĘN AI ╦ŃĘ©PULSE┐╔ęįīó─Ż║²Īó¤oĘ©ūR(sh©¬)äeĄ─╚╦─śłDŽ±▐D(zhu©Żn)ōQ│╔ėŗ(j©¼)╦ŃÖC(j©®)╔·│╔Ą─łDŽ±Ż¼Ųõ╝Ü(x©¼)╣Ø(ji©”)▒╚ų«Ū░╚╬║╬Ģr(sh©¬)║“Č╝Ė³╝ėŠ½╝Ü(x©¼)Īó▒Ųšµ
I┴╦├┤╦ŃĘ©īŻ╝ęäóĮĮķĮB═Ų╦]śI(y©©)äš(w©┤)▒│Š░Ż¼░³└©═Ų╦]«a(ch©Żn)ŲĘą╬æB(t©żi)╝░╦ŃĘ©ā×(y©Łu)╗»─┐ś╦(bi©Īo)Ż╗╚╗║¾╩Ū╦ŃĘ©Ą─č▌▀M(j©¼n)┬ĘŠĆŻ╗ūŅ║¾ųž³c(di©Żn)ĮķĮBį┌ŠĆīW(xu©”)┴Ģ(x©¬)╩Ū╚ń║╬į┌I┴╦├┤═Ų╦]ŅI(l©½ng)ė“?q©▒)Ź█`Ą─
ā×(y©Łu)┐ß═Ų╦]śI(y©©)äš(w©┤)Ż¼╦ŃĘ©æ¬(y©®ng)ė├ł÷(ch©Żng)Š░▒ŖČÓŻ¼ąĶŪ¾ņ`╗ŅČÓūāŻ¼ąĶę¬ę╗╠ū═©ė├śI(y©©)äš(w©┤)┐“╝▄Ż¼ų¦│ų▀\(y©┤n)ąąĢr(sh©¬)Ą─╦ŃĘ©┴„│╠Ą─čb┼õŻ¼╠ß╔²╦ŃĘ©Ę■äš(w©┤)ł÷(ch©Żng)Š░┤ŅĮ©Ą─ą¦┬╩
═©▀^Ęų╬÷ŲõųąĄ─ĻP(gu©Īn)µIå¢Ņ}Ż¼Į©┴ó┴╦ą┬¤ßā╚(n©©i)╚▌Ųž╣Ō├¶Ėą─Żą═Ż¼▓óūŅĮKĮo│÷ę╗ĘNŲž╣Ō┘Yį┤╝s╩°Ž┬Ą─ČÓ─┐ś╦(bi©Īo)ā×(y©Łu)╗»▒Ż┴┐┐“╝▄┼c╦ŃĘ©
ßśī”(du©¼)ĮY(ji©”)╦Ń╩šŃył÷(ch©Żng)Š░ųą╔╠ŲĘūR(sh©¬)äeĄ─ļy³c(di©Żn)Ż¼Å─╔╠ŲĘūR(sh©¬)äe┬õĄžųąĄ──Żą═▀xō±ĪóöĄ(sh©┤)ō■(j©┤)╠¶▀x┼cś╦(bi©Īo)ūóĪóŪ░Č╦║═įŲČ╦▓┐╩Īó─Żą═Ė─▀M(j©¼n)Ą╚ĘĮ├µŻ¼▀M(j©¼n)ąą┴╦╔Ņ╚ļųvĮŌ
╔±Įø(j©®ng)ą╬æB(t©żi)ĮY(ji©”)śŗ(g©░u)╚┌║ŽīW(xu©”)┴Ģ(x©¬)║═ėøæø╣”─▄ŅI(l©½ng)ė“Ą─蹊┐ų„ę¬╝»ųąį┌╚╦╣ż═╗ė|Ą─┐╔╦▄ąįĘĮ├µŻ¼═¼Ģr(sh©¬)╔±Įø(j©®ng)į¬─żĄ─╣╠ėą┐╔╦▄ąįį┌╔±Įø(j©®ng)ą╬æB(t©żi)ą┼Žó╠Ä└ĒĄ─īŹ(sh©¬)¼F(xi©żn)ųąę▓║▄ųžę¬
ÖC(j©®)Ų„īW(xu©”)┴Ģ(x©¬)Š═╩Ū═©▀^Įø(j©®ng)“×(y©żn)üĒīżšę╦³īW(xu©”)┴Ģ(x©¬)Ą──Ż╩ĮŻ¼Č°╚╦╣żųŪ─▄╩Ū└¹ė├Įø(j©®ng)“×(y©żn)üĒ½@╚Īų¬ūR(sh©¬)║═╝╝─▄Ż¼▓óīó▀@ą®ų¬ūR(sh©¬)æ¬(y©®ng)ė├ė┌ą┬Ą─Łh(hu©ón)Š│
Ą╬Ą╬ÖC(j©®)Ų„īW(xu©”)┴Ģ(x©¬)ł÷(ch©Żng)Š░Ž┬Ą─ k8s ┬õĄžīŹ(sh©¬)█`┼cČ■┤╬ķ_░l(f©Ī)Ą─╝╝ąg(sh©┤)īŹ(sh©¬)█`┼cĮø(j©®ng)“×(y©żn)Ż¼░³└©ŲĮ┼_(t©ói)ĘĆ(w©¦n)Č©ąįĪóęūė├ąįĪó└¹ė├┬╩ĪóŲĮ┼_(t©ói) k8s ░µ▒Š╔²╝ē(j©¬)┼cČ■┤╬ķ_░l(f©Ī)Ą╚ā╚(n©©i)╚▌
┤¾ą═╔╠ė├Ģr(sh©¬)ą“öĄ(sh©┤)ō■(j©┤)ē║┐sĄ─╠žąįŻ¼╠ß│÷┴╦ę╗ĘNą┬Ą─╦ŃĘ©Ż¼ĘųŽĒė├╔ŅČ╚ÅŖ(qi©óng)╗»īW(xu©”)┴Ģ(x©¬)▀M(j©¼n)ąąöĄ(sh©┤)ō■(j©┤)ē║┐sĄ─蹊┐╠Į╦„






