

ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)╩Ū└¹ė├ļŖäė(d©░ng)ÖC(j©®)«a(ch©Żn)╔·Ą─┴”╗“┴”ŠžŻ¼ų▒Įė╗“Įø(j©®ng)▀^(gu©░)£p╦┘ÖC(j©®)śŗ(g©░u)“ī(q©▒)äė(d©░ng)╣żśI(y©©)ÖC(j©®)ąĄ╩ųŻ¼ęį½@Ą├╦∙ąĶĄ─╬╗ų├Īó╦┘Č╚Īó╝ė╦┘Č╚ĪŻļŖÖC(j©®)“ī(q©▒)äė(d©░ng)╩Ū╝╝ąg(sh©┤)▌^×ķ│╔╩ņĪóæ¬(y©®ng)ė├ÅVĘ║Ą─ę╗ĘN“ī(q©▒)äė(d©░ng)ĘĮ╩ĮŻ¼×ķ┤¾ČÓ öĄ(sh©┤)ņ`Ū╔╩ų╦∙▓╔ė├ĪŻ
ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ą─ņ`Ū╔╩ųĄ─“ī(q©▒)äė(d©░ng)ą╬╩Į┐╔ęįĘų×ķą²▐D(zhu©Żn)ą═“ī(q©▒)äė(d©░ng)║═ų▒ŠĆą═“ī(q©▒)äė(d©░ng)ĪŻ
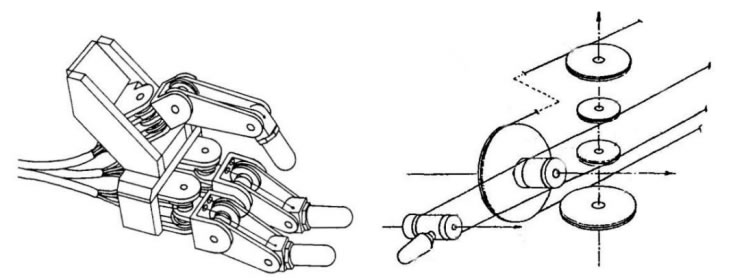
▓╔ė├ą²▐D(zhu©Żn)ą═“ī(q©▒)äė(d©░ng)Ą─ņ`Ū╔╩ųęį StanfordŻ»JPL ╩ų×ķ┤·▒ĒŻ¼Ųõ“ī(q©▒)äė(d©░ng)ŽĄĮy(t©»ng)ė╔ų▒┴„ļŖÖC(j©®)║═²X▌å £p╦┘ÖC(j©®)śŗ(g©░u)ĮM│╔Ż¼ę“Č°¾wĘe▌^┤¾Ż¼“ī(q©▒)äė(d©░ng)ŽĄĮy(t©»ng)ų╗─▄Ę┼į┌╩ųšŲ▓┐╬╗Ż¼═©▀^(gu©░)ļņ▀M(j©¼n)ąą╩ųųĖĻP(gu©Īn)╣Ø(ji©”)Ą─ ▀h(yu©Żn)ŠÓļx“ī(q©▒)äė(d©░ng)ĪŻ
Į³─ĻüĒ(l©ói)Ż¼╬óą═“ī(q©▒)äė(d©░ng)Ų„║═£p╦┘Ų„Ą─░l(f©Ī)š╣×ķ╩ųųĖ“ī(q©▒)äė(d©░ng)ŽĄĮy(t©»ng)Ą─╬óą═╗»║═╝»│╔╗»äō(chu©żng)įņ┴╦Śl╝■ĪŻ └²╚ńŻ¼Ą┬ć°(gu©«)Ą─ DLR ņ`Ū╔╩ų▓╔ė├ų▒ŠĆą═“ī(q©▒)äė(d©░ng)Ų„üĒ(l©ói)“ī(q©▒)äė(d©░ng)ĻP(gu©Īn)╣Ø(ji©”)Ż¼Ųõų▒ŠĆ“ī(q©▒)äė(d©░ng)Ų„īóą²▐D(zhu©Żn)ļŖÖC(j©®)Īó ą²▐D(zhu©Żn)ų▒ŠĆ▐D(zhu©Żn)ōQĮY(ji©”)śŗ(g©░u)║═£p╦┘ÖC(j©®)Č╝╝»│╔į┌ņ`Ū╔╩ųā╚(n©©i)▓┐ĪŻįōņ`Ū╔╩ų▓╔ė├┴╦─ŻēK╗»Ą─įO(sh©©)ėŗ(j©¼)╦╝ŽļŻ¼ ė╔╦─Ė∙═Ļ╚½ŽÓ═¼Ą─╩ųųĖĮM│╔Ż¼├┐Ė∙╩ųųĖėą 4 éĆ(g©©)ĻP(gu©Īn)╣Ø(ji©”)Ż¼3 éĆ(g©©)ūįė╔Č╚Ż¼─®Č╦Ą─ 2 éĆ(g©©)ĻP(gu©Īn)╣Ø(ji©”)Ę┬ šš╚╦╩ųįO(sh©©)ėŗ(j©¼)│╔ 1:1 Ą─±Ņ║Ž▀\(y©┤n)äė(d©░ng)ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°(sh©▒)^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |



