ė▓╝■śŗ│╔Ż║ų„ę¬Ęų×ķł╠(zh©¬)ąąŽĄĮy(t©»ng)ĪóĖąų¬ŽĄĮy(t©»ng)ĪóŲõ╦¹▓┐Ęų╚²ēKĪŻŲõųąŻ¼ł╠(zh©¬)ąąŽĄĮy(t©»ng)ė╔ų▒ŠĆł╠(zh©¬)ąąŲ„Īóą²▐Dł╠(zh©¬)ąąŲ„Īóņ`Ū╔╩ų╚²▓┐ĘųĮM│╔ĪŻĖąų¬ŽĄĮy(t©»ng)ęĢ▓╗═¼╝╝ąg┬ĘÅĮČ°Č©Ż¼ų„ę¬░³└©ęĢėXé„ĖąŲ„Īó║┴├ū▓©└ū▀_ĪóæTąįī¦
║ĮĄ╚ĪŻ
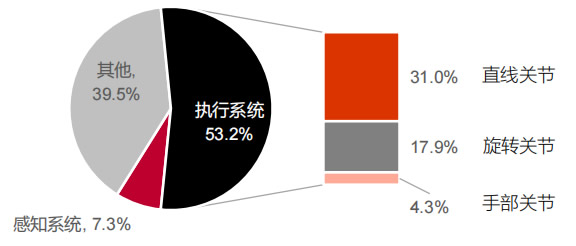
│╔▒Šśŗ│╔Ż║ęį▀hŲ┌20╚få╬ār£y╦ŃŻ¼ł╠(zh©¬)ąąŽĄĮy(t©»ng)BOMš╝▒╚ūŅĖ▀Ż¼╝s53.2%Ż©Ųõųąų▒ŠĆĪóą²▐DĪó╩ų▓┐Ęųäe
š╝31.0%Īó17.9%Īó4.3%Ż®Ż╗Ėąų¬ŽĄĮy(t©»ng)š╝7.3%Ż¼Ųõ╦¹ąŠŲ¼ĪóļŖ│žĄ╚▓┐╝■║Žėŗš╝▒╚39.5%ĪŻ
║╦ą─▓┐╝■Ż║ł╠(zh©¬)ąąŽĄĮy(t©»ng)×ķ╚╦ą╬ÖCŲ„╚╦ūŅųžę¬Ą─ĮM│╔▓┐ĘųĪŻ
Š▀¾wüĒ┐┤Ż¼
1Ż®ų▒ŠĆł╠(zh©¬)ąąŲ„Ż║Ęų▓╝ė┌ŽźųŌĄ╚å╬
ūįė╔Č╚╝░═¾§ūĄ╚ļpūįė╔Č╚Ūę¾wĘeŠo£ÉĄ─ĻP╣Ø(ji©”)Ż¼Ųõū„ė├╩Ūūāą²▐D▀\äė▐D×ķų▒ŠĆ▀\äėŻ¼ąąąŪØLų∙ĮzĖ▄×ķ║╦
ą─▓┐╝■Ż╗
2Ż®ą²▐Dł╠(zh©¬)ąąŲ„Ż║Ęų▓╝ė┌╝ń▓┐Īó╩ų▓┐Ą╚ČÓūįė╔Č╚ĻP╣Ø(ji©”)Ż¼ū„ė├╩Ūīó─│╬’ą²▐DĄĮę╗Č©ĮŪČ╚═Ļ│╔ą²
▐D▀\äėŻ¼£p╦┘Ų„×ķ║╦ą─▓┐╝■Ż╗
3Ż®ņ`Ū╔╩ųŻ║▀Mąąūź╚Īäėū„Ż¼┐šą─▒ŁļŖÖC×ķ║╦ą─▓┐╝■ĪŻ
ć°Ę└┐Ų╝╝┤¾īWBlackman;╣■Ā¢×I╣żśI(y©©)┤¾īWHIT Humanoid; └Ē╣żģR═»;šŃĮŁ┤¾īW╬“┐š;ā×(y©Łu)▒ž▀xWalkerXĪóā×(y©Łu)ėŲ;ąĪ∙iŲ¹▄ćPX5;▀_ĻY┐Ų╝╝XR-4;▒▒Š®õōĶFéb
╚½Ū“┐šą─▒Ł╩ął÷ęÄ(gu©®)─ŻÅ─2021─ĻĄ─6.75ā|├└į¬į÷ķLų┴2025─ĻĄ─9.36ā|į¬Ż¼CAGR×ķ8.52%ĪŻ2021─Ļ╚½Ū“┐šą─▒ŁļŖÖC╩ął÷ęÄ(gu©®)─ŻāHš╝╬ó╠žļŖÖCĄ─1.73%
╠ž╦╣└ŁĄ─═Ōė^īŻ└¹╚½▓┐ėąą¦Ż¼Ūęų„ę¬╝»ųąį┌╚š▒ŠŻ©4 ╝■Ż®║═ÜWų▐Ż©1 ╝■Ż®,Ųõ╦¹ęč╔ĻšłĄ─ĘĮĘ©ŅÉĪóĮYśŗŅÉīŻ└¹┐╔─▄╔ą╬┤╣½ķ_
╝╝ąg«öŪ░░l(f©Ī)š╣ļAČ╬╝░┌ģä▌Ż║ųĖ│÷╝╝ąg▀M╚ļĘĆ(w©¦n)Č©░l(f©Ī)š╣ļAČ╬Ż¼▒Š¾wĮYśŗĪóųŪ─▄Ėąų¬Īó▀\äė┐žųŲ╩Ū¤ß³c;╠ß╣®┴╦ī”╚╦ą╬ÖCŲ„╚╦╝╝ąg░l(f©Ī)š╣Īó«aśI(y©©)▓╝ŠųĪó╩ął÷┌ģä▌║═╬┤üĒĘĮŽ“Ą─╔Ņ╚ļęŖĮŌ
Ųż─wĄ─ČÓ─ŻæB(t©żi)Ėąų¬×ķ╬ęéāĖą╩▄šµīŹĄ─╬’└Ē╩└Įń╠ß╣®┴╦ųžę¬Ą─╣żŠ▀,ÖCŲ„╚╦▒Ń─▄Ėąų¬ĄĮ╬’ŲĘĄ─┤ų▓┌Č╚,Ė¶┐šĘ„▀^╬╗ų├╬’ŲĘĢrŻ¼╦³╔§ų┴─▄Ž±X╔õŠĆ║═3DÆ▀├Ķāx─ŪśėĖąų¬ĄĮ╬’ŲĘĄ─▓─┘|║═ą╬ĀŅ
╬┤üĒįŲČ╦īŹ“×╩ę┐╔ęį▒╗Į©įOį┌╠½Ļ¢─▄/’L─▄│õūŃĄ─╗──«ųąŻ¼┐Ųčą╚╦åT┐╔ęįÅ─╚½╩└Įń╚╬ęŌę╗éĆĄžĘĮ┐žųŲįŲČ╦īŹ“×╩ęĪŻł@ģ^(q©▒)ā╚Ą─ā╔┤¾ų„¾wĪ¬Ī¬öĄ(sh©┤)ō■(j©┤)┴„║═╬’┘|┴„Ż¼īóĘųäeė╔╗ź┬ō(li©ón)Ą─AIŠW(w©Żng)Įj║═ÖCŲ„╚╦ŠW(w©Żng)Įjžōž¤▀\▌d
─z¾wÖCŲ„╚╦Ż©CRŻ®╩Ūūįų„Ņw┴ŻÖCŲ„Ż¼į┌─z¾wŚl╝■Ž┬▓╔ė├Ī░ĖąėX-ėŗäØ-ąąäėĪ▒ĘČ╩ĮŻ¼─┐ś╦╩Ūīó╬óė^ÖCŲ„╚╦ŽĄĮy(t©»ng)▓┐╩ĄĮą┬Łh(hu©ón)Š│ųąĪŻ▀@ĘNŁh(hu©ón)Š│ųąĄ─ūįų„ąį▒╗Č©┴x×ķÖCŲ„į┌ø]ėą═Ō▓┐“īäė║═▒O(ji©Īn)ČĮĄ─ŪķørŽ┬ū÷│÷øQ▓▀Ż©╗“Ī░ėŗ╦ŃĪ▒Ż®Ą──▄┴”
īó£╩┤_Ą─ 3D Äū║╬łDą╬┼cüĒūį 2D ╗∙ĄA─Żą═Ą─žSĖ╗šZ┴xĮY║ŽŲüĒŻ¼ūīÖCŲ„╚╦─▄ē“└¹ė├ 2D ╗∙ĄA─Żą═ųąžSĖ╗Ą─ęĢėX║═šZčįŽ╚“ׯ¼═Ļ│╔šZčįųĖī¦Ą─▓┘ū„
▀\äė┐žųŲŲ„ęįé„ĖąŲ„×ķą┼╠¢├¶Ėąį¬╝■,ęįļŖÖC╗“äė┴”čbų├║═ł╠(zh©¬)ąąå╬į¬×ķ┐žųŲī”Ž¾Ą─ę╗ĘN┐žųŲčbų├,×ķļŖÖC╗“Ųõ╦³äė┴”║═ł╠(zh©¬)ąąčbų├╠ß╣®š²┤_Ą─┐žųŲą┼╠¢
Ąõą═Ą─ÖCŲ„╚╦ļŖūėļŖÜŌĮYśŗų„ę¬ė╔ęįŽ┬▓┐ĘųĮM│╔, ļŖį┤╣▄└Ē,Łh(hu©ón)Š│Ėąų¬,ųąčļ┐žųŲå╬į¬,ļŖÖC┐žųŲ,╚╦ÖCĮń├µ, ┐╔▀xĮM╝■║═Ųõ╦¹æ¬ė├
═©▀^äė┴”į¬╝■═Ųäė╣żū„Įķ┘|(ę║¾w╗“ÜŌ¾w)į┌Ėū¾wā╚«a ╔·ē║┴”▓ŅČ°“īäėł╠(zh©¬)ąąį¬╝■,┼cŲõ╦¹“īäėĘĮ╩ĮŽÓ▒╚,ę║ē║║═ÜŌē║“īäėŠ▀ėą▌ö│÷╣”┬╩├▄Č╚┤¾,ęūė┌īŹ¼F(xi©żn)▀hŠÓļx┐žųŲęį╝░▌ö│÷┴”┤¾Ą╚ā×(y©Łu)³c
╬óą═“īäėŲ„║═£p╦┘Ų„Ą─░l(f©Ī)š╣×ķ╩ųųĖ“īäėŽĄĮy(t©»ng)Ą─╬óą═╗»║═╝»│╔╗»äō(chu©żng)įņ┴╦Śl╝■,Ųõų▒ŠĆ“īäėŲ„īóą²▐DļŖÖC,ą²▐Dų▒ŠĆ▐DōQĮYśŗ║═£p╦┘ÖCČ╝╝»│╔į┌ņ`Ū╔╩ųā╚▓┐




